4 основные положения, Датчики пути перемещения и референтные метки – Инструкция по эксплуатации HEIDENHAIN CNC Pilot 4290 V7.1
Страница 39
HEIDENHAIN CNC PILOT 4290
39
1.4
Основные
по
л
о
ж
е
ния
1.4 Основные положения
Датчики пути перемещения и референтные
метки
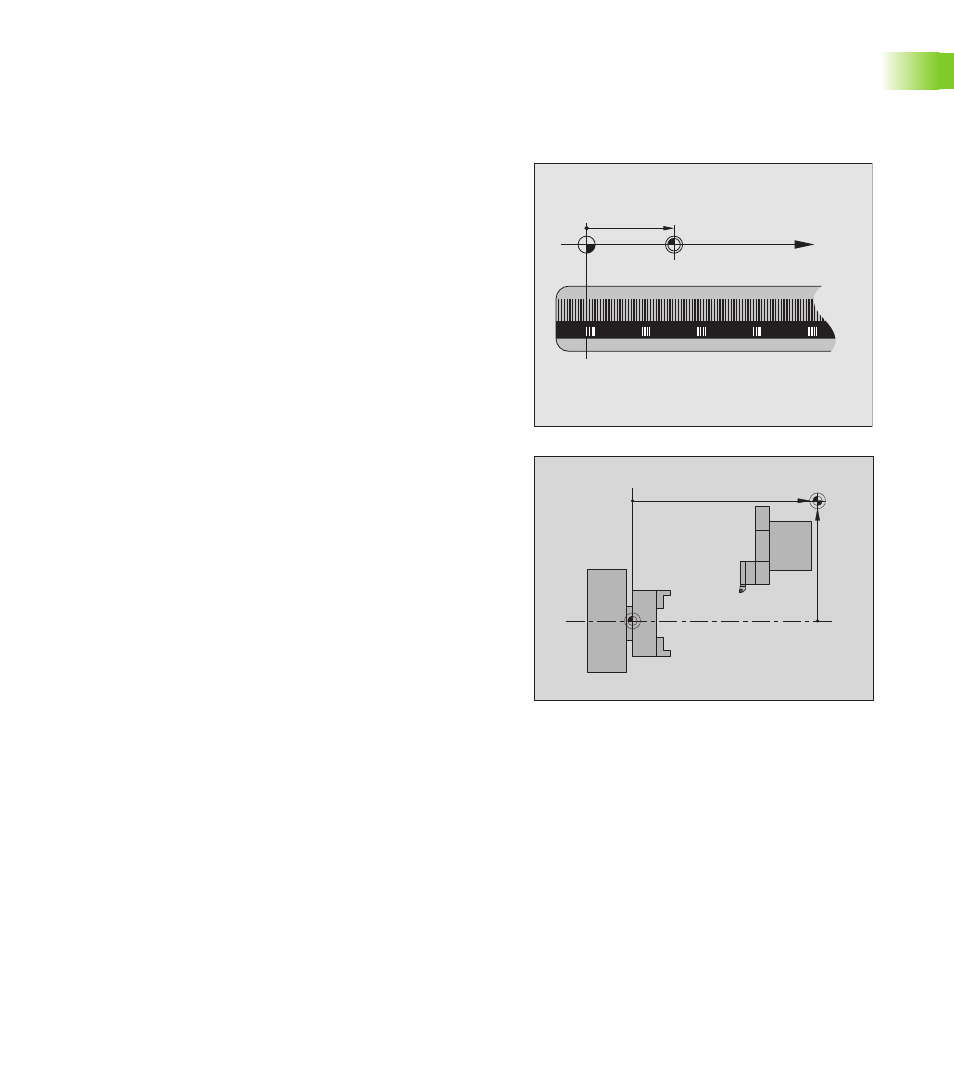
На рабочих органах станка находятся датчики измерения
перемещений, которые регистрируют положение оси, а также
инструмента. При перемещении оси станка ее датчик
перемещений выдает электрический сигнал, на основании
которого система ЧПУ рассчитывает точное фактическое
положение оси.
В случае перерыва в электроснабжении теряется связь между
положением оси и расчитанным фактическим положением. Для
восстанавления этой связи инкрементные датчики измерения
перемещения имеют референтные метки. При пересечении
референтной метки система ЧПУ получает сигнал,
обозначающий жесткую точку привязки станка. Таким образом
CNC PILOT может восстановить связь фактического положения и
актуального положения оси. В случае датчиков линейных
перемещений с кодированными точками привязки необходимо
переместить ось максимум на 20 мм, для угловых датчиков -
максимум на 20°.
В случае абсолютных датчиков измерения после включения в
систему ЧПУ передается абслютное значение положения. Таким
образом, без перемещения оси восстановливается связь между
фактическим положением и положением оси непосредственно
после включения.
X (Z,Y)
X
MP
Zref
Xref
M