Коммуникационные порты, Коммуникационные порты -7, Usb -7 – Инструкция по эксплуатации Basler Electric DGC-2020
Страница 81: Canbus -7
† Для контроллеров DGC-2020, в которых используется встроенное программное обеспечение
версии X.14.00 и последующих версий, этот светодиодный индикатор является полностью
программируемым посредством программы BESTlogic™Plus.
Кроме того, индикатор RDP-110 указывает, когда контроллер DGC-2020 не работает в
автоматическом режиме и когда питание нагрузки осуществляется от генератора. Когда
контроллер DGC-2020 находится в аварийном состоянии, не указанном выше, светится
светодиодный индикатор Switch Not In Auto (Переключатель не в автоматическом режиме) и
подается звуковой сигнал. Для получения дальнейшей информации об индикаторе RDP-110
закажите бюллетень об изделии SNE.
Коммуникационные соединения RDP-110 выполняются с клеммой 6 (RDP TXD–) и 7 (RDP TXD+)
контроллера DGC-2020. Оперативный ток для RDP-110 подается с клеммы 4 ((RDP BATT+) и 5
(RDP BATT–
) контроллера DGC-2020.
Коммуникационные порты
Коммуникации DGC-2020 включают USB, CAN, RS-485 (опциональный) и опциональный модем.
USB
Разъем мини-В USB осуществляет коммуникации с ПК и программой BESTCOMSPlus
®
. DGC-2020
присоеднияется к ПК стандартным кабелем. BESTCOMSPlus это Windows
®
-
приложение, которое
поставляется в комплекте с DGC-2020. Детальное описание BESTCOMSPlus дно в разделе 4,
BESTCOMSPlus.
CAN Bus
Controler Area Network (CAN) –
стандартный интерфейс между несколькими контроллерами и
общей сетью со стандартным протоколом сообщений. DGC-2020 имеют интерфейс CANbus,
который поддерживает протоколы SAE J1939 и MTU.
Установки, контролируемые DGC-2020 могут также иметь устройство управления двигателем
(Engine Control Unit (ECU). CANbus позволяет соединить ECU и DGC-2020. ECU передает
оперативную информацию на DGC-2020 посредством интерфейса CANbus. Оперативные
параметры и диагностическая информация, если поддерживается ECU,декодируется и
отображается на дисплее.
Первичная цель CANbus – получить оперативные параметры двигателя для мониторинга скорости,
температуры охлаждающей среды, давления масла, уровня охлаждающей среды и часов работы
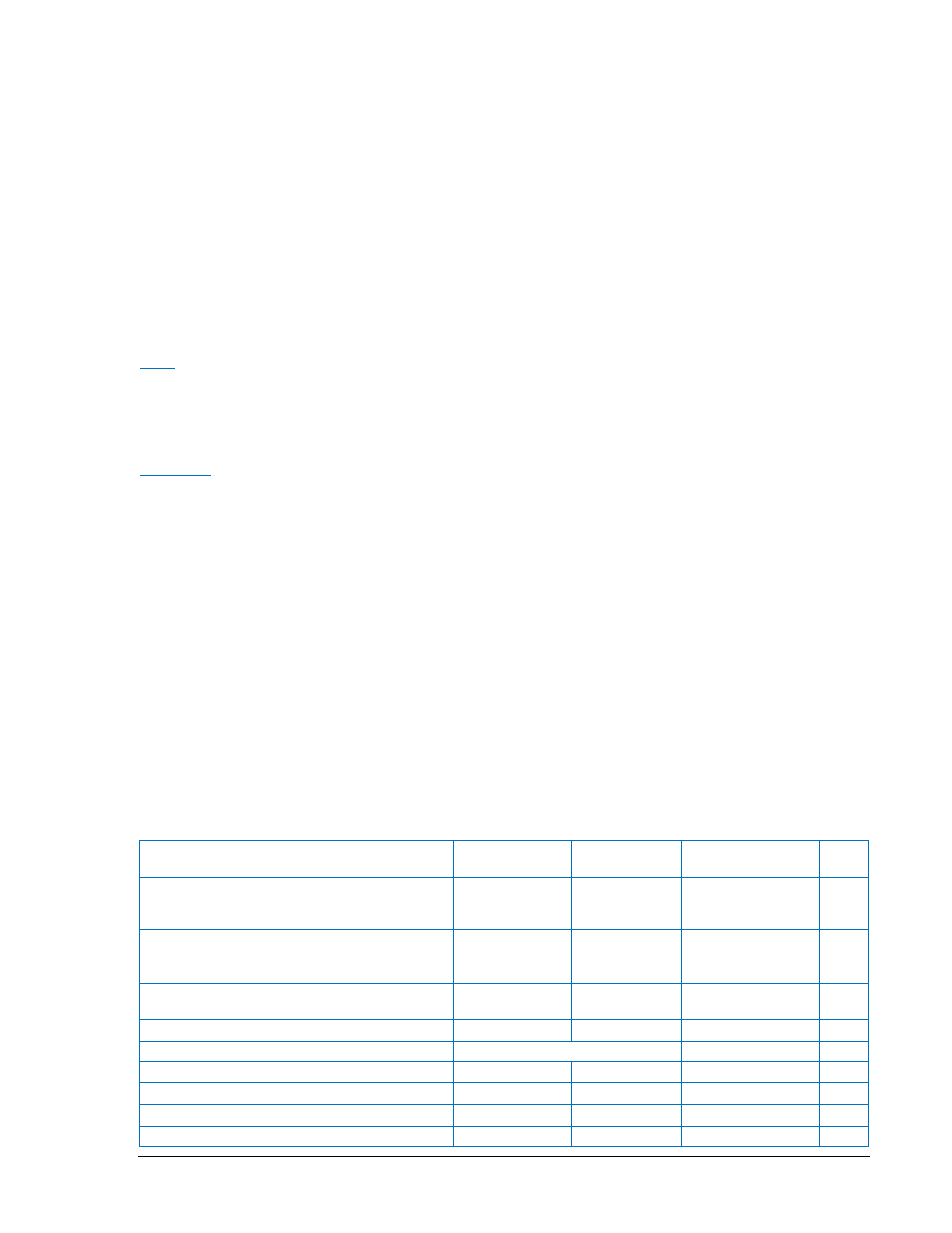
двигателя без необходимости применения отдельных датчиков. В таблице 3-1 перечислены
параметры ECU и в таблице 3-2 перечислены конфигурационные параметры двигателя
поддерживаемые интерфейсом DGC-2020 CANbus. Эти параметры передаются посредством
CANbus с заданным интервалом. См. колонки, помеченные как скорость обновления в таблице 3-1.
Эта же информация доступна также по отдельному запросу.
CANbus присоединяется посредством клемм 48 (CAN L), 49 (CAN H) и 50 (экран).
Таблица 3-1. Параметры ECU получаемые посредством интерфейса CANbus
Параметр ECU
Метрические
единицы
Английские
единицы
Скорость
обновления
∗
SPN
Относительный момент двигателя
%
%
Определяется
скоростью
двигателя
513
Температура на выходе сажевого фильтра
дополнительной очистки выхлопов
дизельного двигателя 1
°C
°F
500
мс
3246
Дифференциальное давление воздушного
фильтра
кПа
psi
500 мс
107
Температура входящего воздуха
°C
°F
1 с
172
Обратная связь сброса сигнализации
бинарные (0 или 1)
1 с
2815
Температура окружающей среды
°C
°F
1 с
171
Дополнительное давление 1
кПа
psi
по запросу
1387
Дополнительное давление 2
кПа
psi
по запросу
1388
Барометрическое давление
кПа
psi
1 с
108
9400273990 Bep. X1
DGC-
2020 Функциональное описание
3-7