Процедуры тонкой настройки – Инструкция по эксплуатации Basler Electric DGC-2020
Страница 662
случае функция регулировки напряжения может использоваться для противодействия такому
дрейфу.
В модуле распределения нагрузки используется PID (пропорциональное, интегральное,
дифференциальное) управление для распределения нагрузки по мощности и реактивной
мощности, управления скоростью и напряжением. Ниже приведено краткое описание 3 основных
параметров настройки и их влияния на работу системы.
•
K
p
—
Коэффициент пропорционального усиления — Коэффициент пропорционального
усиления
изменяет
выход
пропорционально
текущему
значению
ошибки.
Пропорциональный отклик можно настроить, умножив значение ошибки на постоянную K
p
,
называемую пропорциональным усилением. Увеличение значения K
p
обычно обозначает
более быстрый отклик, поскольку чем больше ошибка, тем больший сигнал обратной связи
нужно компенсировать. Излишне большое значение пропорционального коэффициента
приводит к нестабильности системы.
•
K
i
—
Интегральный коэффициент усиления — Воздействие интегрального коэффициента
пропорционально и величине, и длительности ошибки. Для достижения системой нулевой
статической ошибки требуется определенное интегральное усиление. Интегральный
коэффициент (при использовании совместно с пропорциональным коэффициентом)
ускоряет ход процесса в направлении уставки и устраняет остаточную статическую ошибку,
которая возникает при использовании только пропорционального контроллера. Более
высокое значение K
i
означает ускоренное устранение ошибок состояния. Недостатком
является увеличение перерегулировки: во время отклика переходного состояния любую
отрицательную ошибку нужно интегрально устранить посредством положительной ошибки
до достижения стабильного состояния.
•
K
d
—
Дифференциальный коэффициент усиления — Дифференциальный коэффициент
усиления снижает скорость изменения выходного сигнала контроллера и используется для
сокращения величины перерегулировки, производимой интегральным компонентом, а
также для повышения стабильности процесса и работы контроллера в их совокупности.
Однако дифференциация сигнала приводит к усилению в нем шума; таким образом, этот
компонент в контроллере может быть чувствительным к шуму в величине ошибки и
вызывать нестабильность процесса при достаточно больших уровне шума и
дифференциальном усилении. Увеличение значения K
d
уменьшает перерегулировку,
однако замедляет отклик при переходном состоянии и может стать причиной нестабильной
работы системы. В целом рекомендуется применять K
d
в контроллерах DGC только в том
случае, когда результаты испытаний показывают, что такое применение улучшает работу
системы.
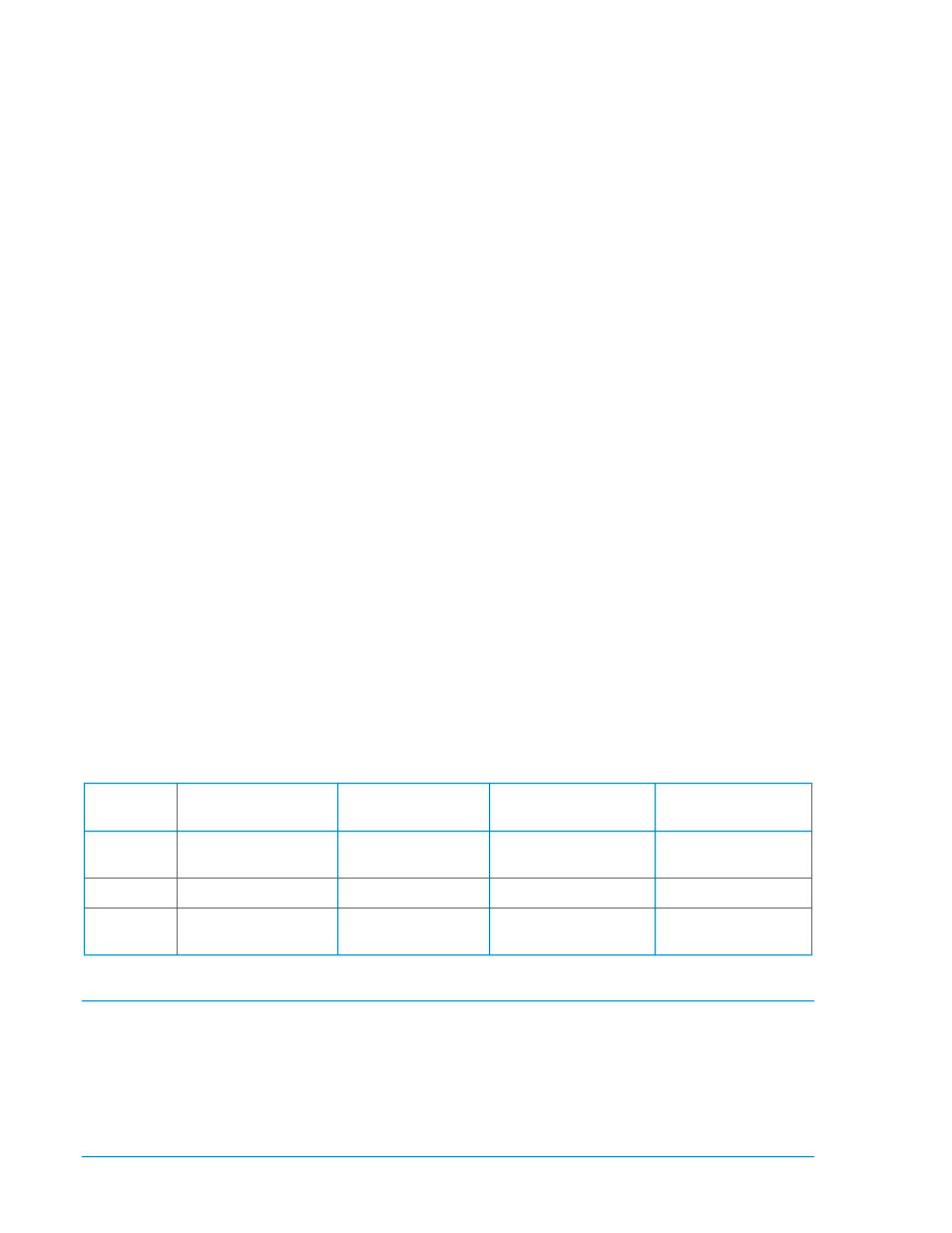
Воздействие увеличения значений параметров приведено в Таблица C-1.
Таблица C-1. Воздействие, наблюдаемое при увеличении значений параметров
Параметр Время нарастания Перерегулировка
Время
установления
Статическая
ошибка
K
p
Уменьшение
Увеличение
Небольшое
изменение
Уменьшение
K
i
Уменьшение
Увеличение
Увеличение
Устранение
K
d
Небольшое
изменение
Уменьшение
Уменьшение
Нет
Процедуры тонкой настройки
До выполнения тонкой настройки контроллера настоятельно рекомендуется сконфигурировать
защиту генератора, в частности защиту по обратной мощности и защиту от потери возбуждения,
чтобы обеспечить защиту машинного оборудования на тот случай, если в ходе тонкой настройки
возникнет опасная обратная мощность или обратная реактивная мощность.
C-2
DGC-
2020 Настройка параметров PID-управления 9400200990 Bep. X1