3 наезд и от ъ е зд от ко н тур а – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-04)
Страница 246
246
6 Программирование: программирование контуров
6.3
Наезд
и
от
ъ
е
зд
от
ко
н
тур
а
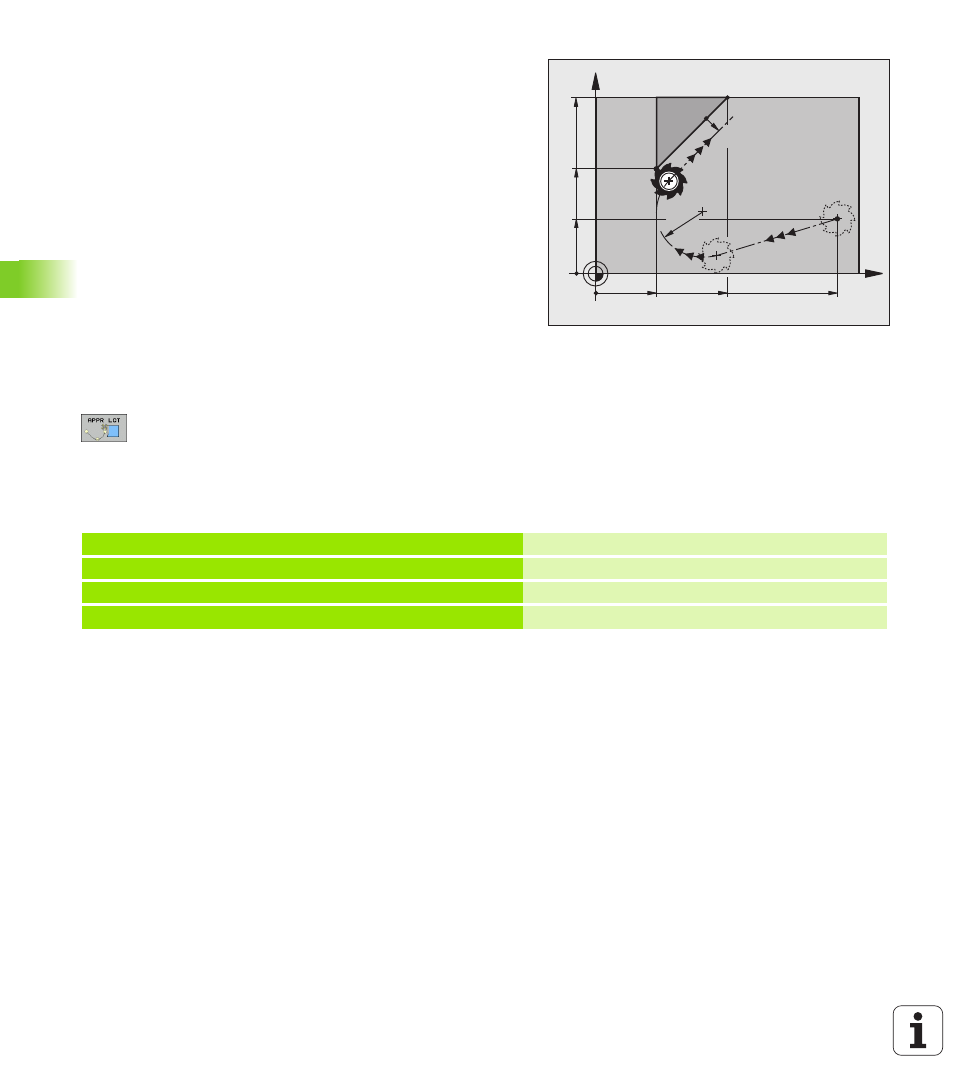
Подвод по круговой траектории с
тангенциальным примыканием к контуру и
отрезке прямой: APPR LCT
УЧПУ перемещает инструмент по прямой от точки старта P
S
к
вспомогательной точке P
H
. Оттуда перемещает его по круговой
траектории к первой точке контура P
A
. Программированная в
кадре APPR подача действует для целово пути, который
перемещатся УЧПУ в кадре подвода (участок P
S
– P
A
).
Если в кадре подвода программировали все три главные оси
координат X, Y и Z, то ЧПУ перемещает от определенной до кадра
APPR позиции во всех осях одновременно до вспомогательной
точки P
H
а затем от P
H
до P
A
только на плоскости обработки.
Круговая траектория примыкает тангенциально так к прямой P
S
–
P
H
как и к первому элементу контура. Таким образом она
однозначно определена через радиус R.
Произвольная функция траектории: подвод к точке старта P
S
.
Открыть диалог с помощью клавиши APPR/DEP и softkey
APPR LCT :
Координаты первой точки контура P
A
Радиус R круговой траектории. R ввести с
положительным значением
Коррекция на радиус RR/RL для обработки
ЧУ-кадры в качестве примера
X
Y
10
20
P
A
RR
P
S
R0
P
H
RR
RR
40
10
R10
35
20
7 L X+40 Y+10 RO FMAX M3
P
S
подвод без коррекции на радиус
8 APPR LCT X+10 Y+20 Z-10 R10 RR F100
P
A
с корр. на радиус RR, радиус R=10
9 L X+20 Y+35
Конечная точка первого элемента контура
10 L ...
Следующий элемент контура