2 основы к функциям траектории – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-04)
Страница 238
238
6 Программирование: программирование контуров
6.2
Основы
к
фу
н
кц
и
я
м
траект
ории
6.2 Основы к функциям
траектории
Программирование движения инструмента
для обработки
Когда составляется программа обработки, программируются друг
за другом функции траектории для отдельных элементов контура
загатовки. Для этого вводятся координаты для конечных точек
элементов контура из размерного чертежа. На основании этих
данных, данных инструмента и коррекции радиуса УЧПУ
рассчитывает действительный путь перемещения инструмента.
УЧПУ перемещает одновременно все рабочие органы, которые
были программированы в кадре функции траектории.
Движения параллельно к осям станка
Кадр программы содержит информацию о координатах: УЧПУ
перемещает инструмент параллельно к программированной оси
станка.
В зависимости от конструкции станка, при отработке движется
или инструмент или стол машины с закреплённым инструментом.
При программировании движения по траектории исходится
принципиально из того, что инструмент перемещается.
Пример:
Инструмент сохраняет Y- и Z-координаты и перемещается на
позицию X=100. Смотри рисунок.
Движения на главных плоскостях
Кадр программы содержит две координаты: УЧПУ перемещает
инструмент на программированной плоскости.
Пример:
Инструмент сохраняет Z-координату и перемещается на XY-
плоскости на позицию X=70, Y=50. Смотри рисунок
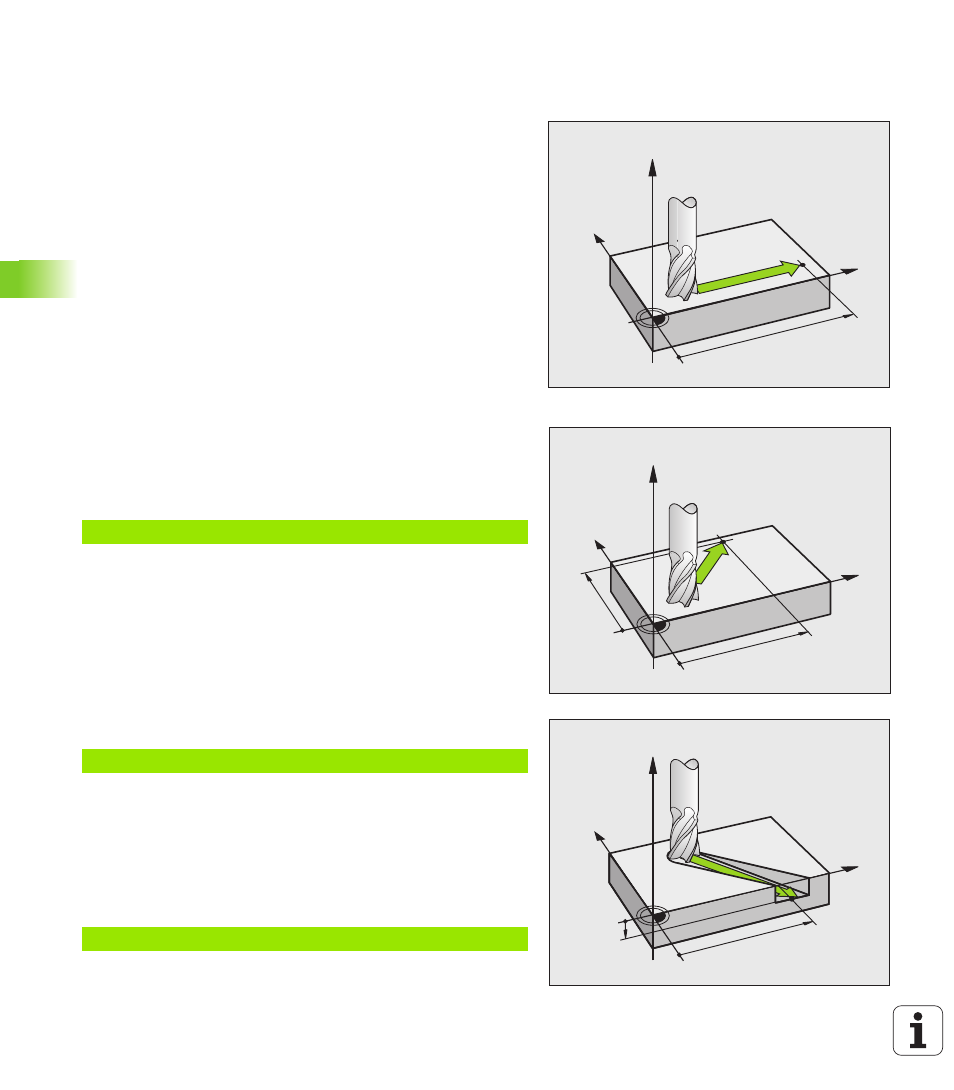
Трёхмерное движение
Кадр программы содержит три координаты: УЧПУ перемещает
инструмент пространственно на программированную позицию.
Пример:
X
Y
Z
100
L X+100
L
Функция траектории “прямая”
X+100
Координаты конечной точки
X
Y
Z
70
50
L X+70 Y+50
X
Y
Z
80
-10
L X+80 Y+0 Z-10