Применение – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-04) ISO programming
Страница 503
HEIDENHAIN iTNC 530
503
9.7
Определ
ение
пл
о
ск
о
сти
обрабо
тки
с
по
м
о
щью
тре
х
то
ч
ек
:
PLANE
P
OINTS
9.7 Определение плоскости
обработки с помощью трех
точек: PLANE POINTS
Применение
Плоскость обработки определяется однозначно указанием трех
произвольных точек P1 до P3 этой плоскости. Эта
возможность реализуется в функции PLANE POINTS .
+X
+Y
+Z
P1
P2
P3
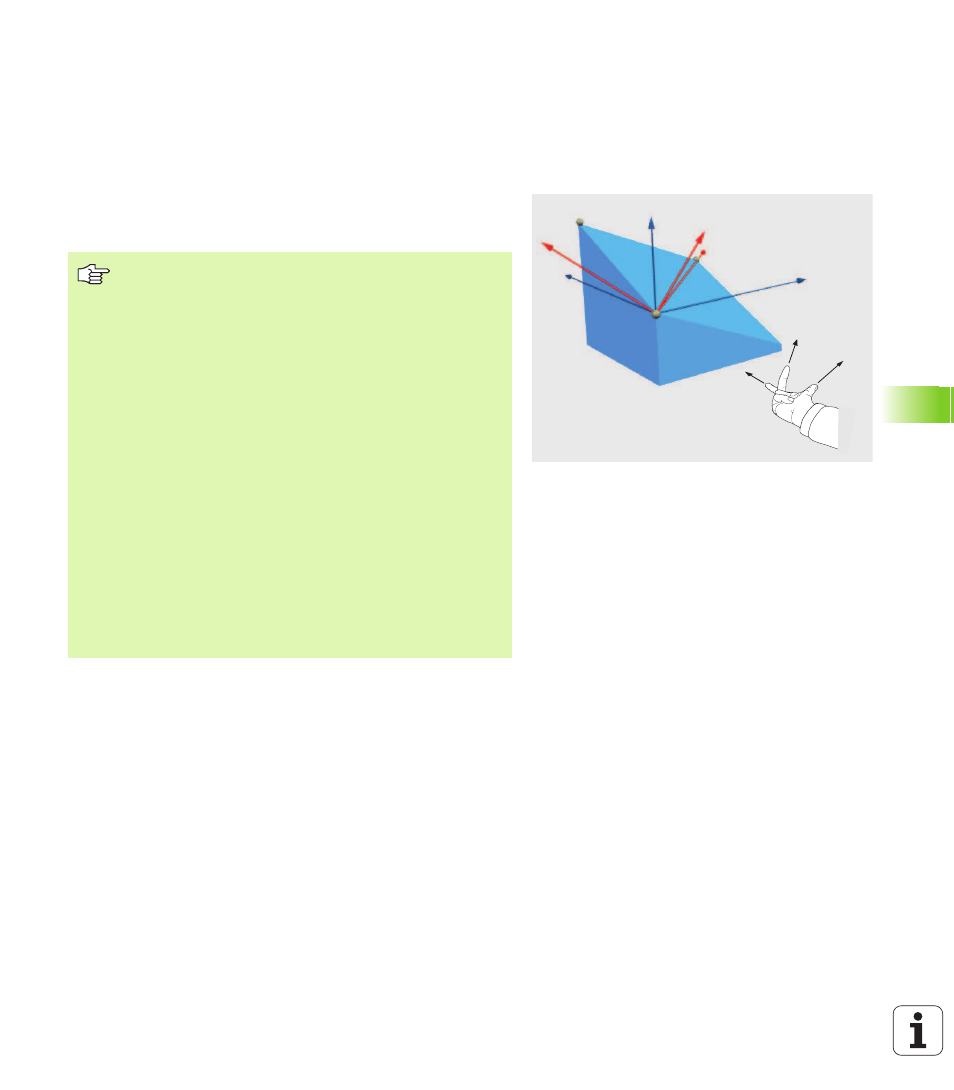
Обратите внимание перед программированием
Соединение от точки 1 до точки 2 определяет
направление наклоненной главной оси ((X при оси
инструментов Z).
Направление наклоненной оси инструментов
определяете через положение 3. точки в отнесении к
линии соединяющей точку 1 и точку 2. С помощью
правила правой руки (большой палец = X-ось,
указательный палец = Y-ось, средний палец = Z-ось,
смотри рисунок справа вверху), действует: большой
палец (X-ось) показывает от точки 1 до точки 2,
указательный палец (Y-ось) показывает параллельно
до наклоненной оси Y в направлении точки 3. Тогда
средний палец показывает в направлении
наклоненной оси инструмента.
Эти три точки определяют наклон плоскости.
Положение активной нулевой точки не изменяется
УЧПУ.
Описание параметров для поведения при
позиционировании: Смотри „Определить поведение
при позиционировании функции PLANE”, страница
509.