Аектории к, Dep ct, 3 наезд и от ъ ез д от ко н тур а – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 422)
Страница 184
184
6 Программирование: программирование контуров
6.3
Наезд
и
от
ъ
ез
д
от
ко
н
тур
а
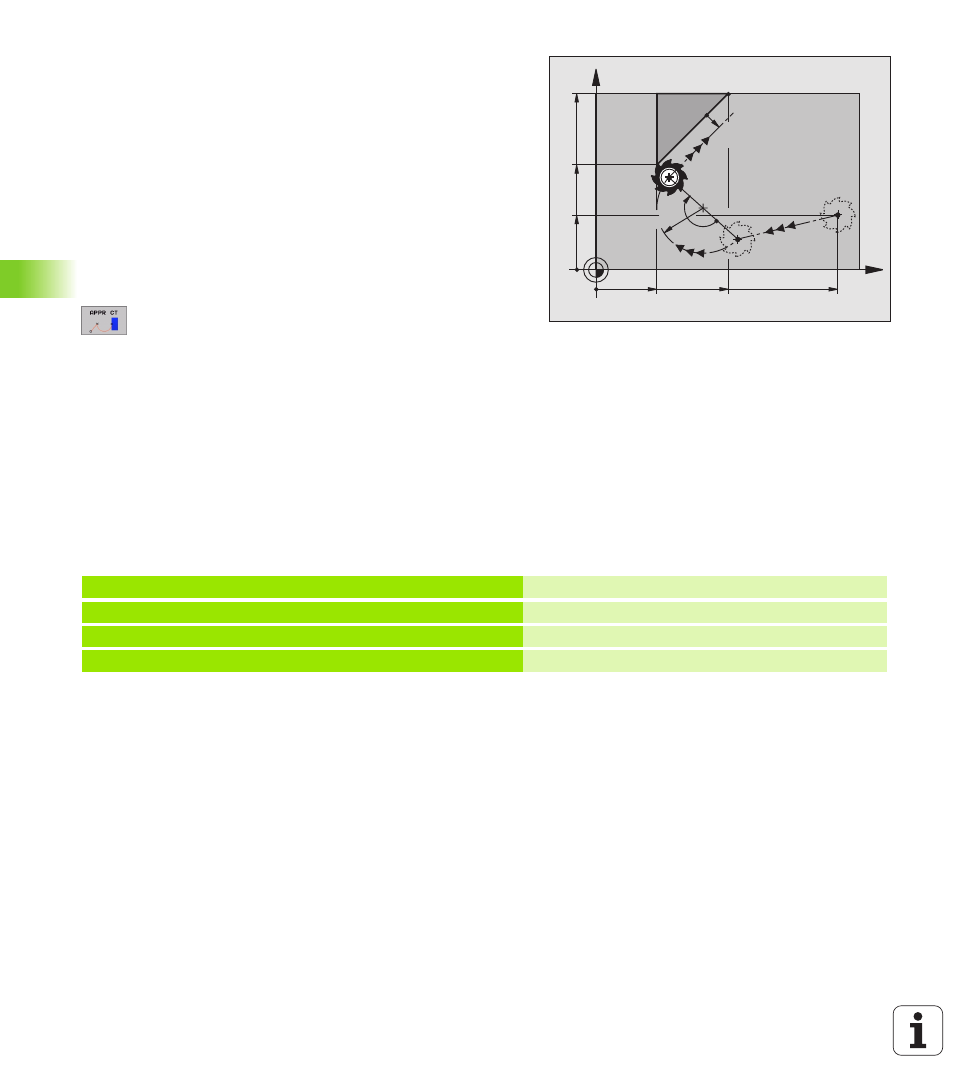
Подвод к контуру по круговой траектории с
тангенциальным примыканием APPR CT
УЧПУ перемещает инструмент по прямой от точки старта P
S
к
вспомогательной точке P
H
. Оттуда перемещает его по круговой
траектории, переходящей тангенциально в первый элемент
контура, к первой точке контура P
A
.
Круговая траектория от P
H
к P
A
установлена на основании
радиуса R и угла центра CCA. Направление круговой траектории
возникает из протекания первого элемента контура.
U
U
U
U
Любая функция траектории: Точку старта P
S
наехать
U
U
U
U
Открыть диалог с помощью клавиши APPR/DEP и Softkey
APPR CT:
U
U
U
U
Координаты первой точки контура P
A
U
U
U
U
Радиус R круговой траектории
n
Наезд загатовки со стороны, определённой
коррекцией радиуса: R ввести с положительным
значением R ввести положительно
n
Наезд загатовки со стороны:
R ввести с отрицательным значением
U
U
U
U
Угол центра CCA круговой траектории
n
CCA ввести только с положительным значением
n
Максимальное значение ввода 360°
U
U
U
U
Коррекция радиуса RR/RL для обработки
ЧУ-записи в качестве примера
X
Y
10
20
P
A
RR
P
S
R0
P
H
RR
RR
40
10
CCA=
180°
R10
35
20
7 L X+40 Y+10 RO FMAX M3
P
S
подвод без коррекции радиуса
8 APPR CT X+10 Y+20 Z-10 CCA180 R+10 RR F100
P
A
с корр. радиуса RR RR, радиус R=10
9 L X+20 Y+35
Конечная точка первого элемента контура
10 L ...
Следующий элемент контура