Рисунок 3-3. блок схема регулятора -30 – Инструкция по эксплуатации Basler Electric IEM-2020
Страница 78
3-30
IEM-2020
Функциональное описание
9441073990 Rev B1
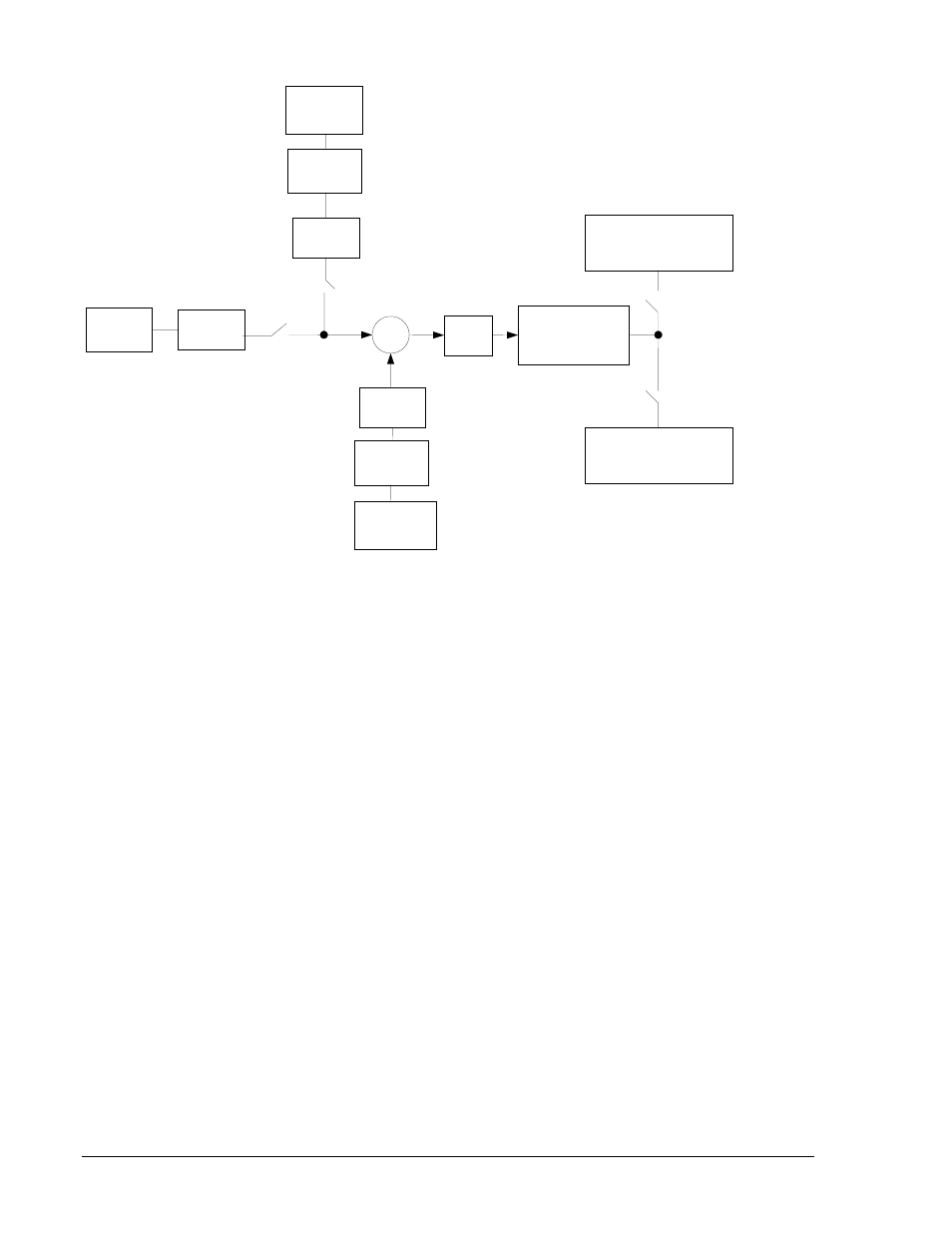
Рисунок 3-3. Блок схема регулятора
Измеряемый параметр замеряется через вход I . Установленная величина задается с монитора
контроля управления BESTCOMSPlus или может быть задана через другой аналоговый вход
(
Аналоговый вход N), использую источник задания параметров.
Значение установленной величины находится в пределах масштабного аналогового входа.
Другими словами, аналоговый вход М измеряет давление трубопровода, где 4 мА эквивалентно 0
фунтов на квадратный дюйм, а 20 мА эквивалентно 150 фунтов на квадратный дюйм. PID-
регулятор может измерять давление в пределах от 0 до 150 фунтов на квадратный дюйм,
следовательно приемлемым значением настройки PID-регулятора будет ряд значений от 0 до 150
фунтов на квадратный дюйм
Зона нечувствительности параметров также отображается на мониторе контроля управления в
масштабируемых единицах. Зона нечувствительности предназначена для предотвращения
чрезмерного ускорения двигателя, в тех случаях, когда нет необходимости корректировать
измеренный параметр, до тех пор, пока он не войдет в зону допустимых значений. Например,
контролирование уровня бака в ветреную погоду. Зона нечувствительности позволяет избегать
контролирования каждой операции при постоянном волновом сигнале на преобразователе.
Алгоритм PID-регулятора работает по принципу блочного управления. Блочное управление
основано на нахождение среднего показателя и присваивания ему 1оодной относительной
единицы. Например, исходя из предыдущего примера, где ряд значений находится в диапазоне от
0 до 150, относительной величиной 1 будет являться значение 75 psi. Тогда 0 psi =-1, 150 psi= +1.
PID
также имеет коэффициенты усиления (Kp, Ki, Kd, Td, and Kg). Когда контакт используется в
качестве выхода, применяются только коэффициенты Kp и Kg .
Выход PID can может быть настроен на запрос данных с CANbus или на контактный вывод.
Отображение выхода PID с CANbus или с контактных выходов описывается в следующих главах.
Источник задания =
Аналоговый вход
PID-
регуляторr
PID Out to CANbus RPM
Request Scaling
PID
выводитсят на
Масштабируемый
контактный выход
Источник задания =
Настройки
пользователя
Вывод
PID = CANBUS
Вывод
PID
=
Контакт
Задаваемая
величина
Аналоговый
вход
шкалы N
Аналоговый
вход
N
Аналоговый вход
М
Масштабируемый
Аналоговый вход
М
+
-
Аналоговый вход M
является обратным
входом заданной величины
Предварительное
суммирование
Предварительное
суммирование
Мертвая
зона
P
0066
-
57
Предварительное
суммирование
Аналоговый вход N
является PID-входом
настраиваемых
параметров