Смотри “определение плоскости, Применение, Странице 534 – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-03)
Страница 534
534
9 Программирование: специальные функции
9.5
Определ
е
ние
пл
о
ск
о
сти
обрабо
тки
че
ре
з
дв
а
в
ект
ора
:
PLANE
VECT
O
R 9.5 Определение плоскости
обработки через два вектора:
PLANE VECTOR
Применение
Дефиницию плоскости обработки через два вектора можете
использовать тогда, если Ваша САПР-система может рассчитать
базисный вектор и вектор нормали наклоненной плоскости
обработки. Многократная нормированная дефиниция не
требуется. УЧПУ расчитывает нормирование внутреннее, так что
можно ввести значения от -99.999999 до +99.999999.
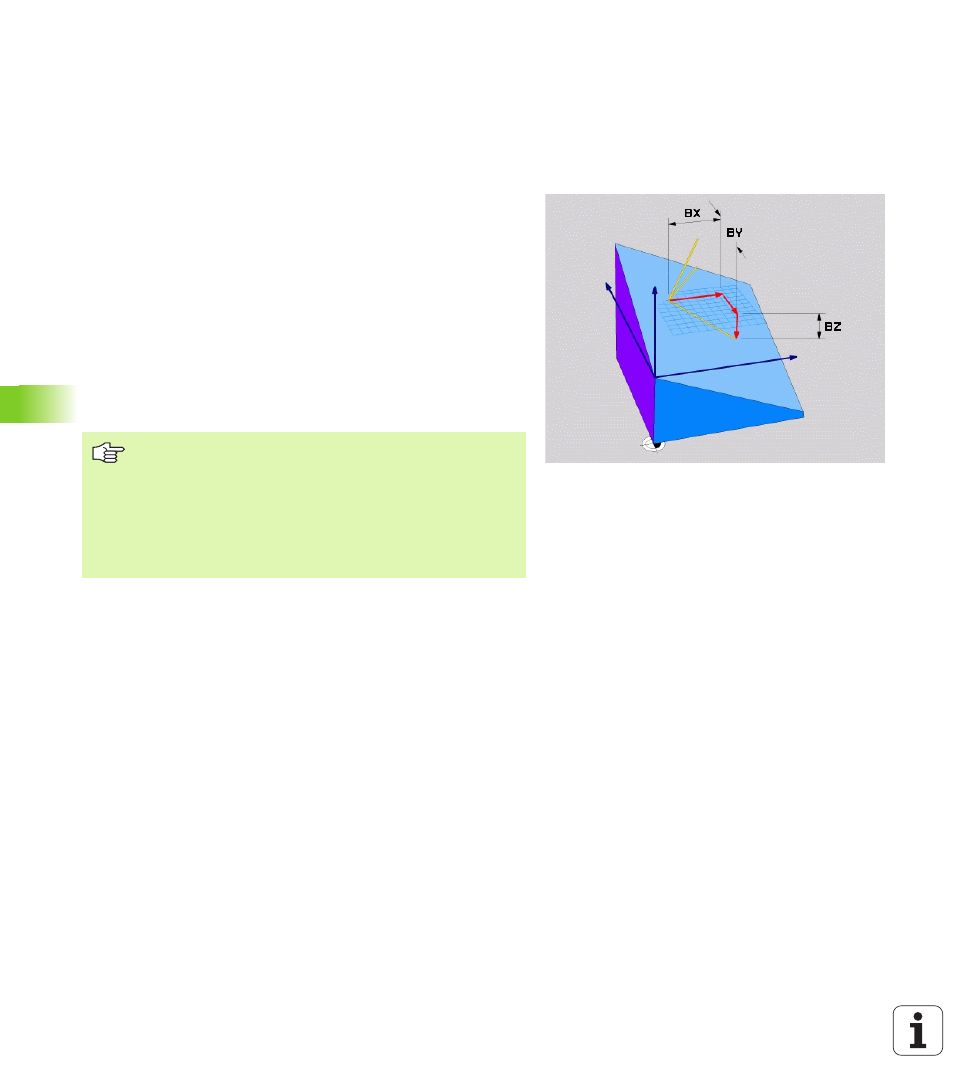
Требуемый для определения плоскости обработки базисный
вектор определен с помощью трех компонентов BX, BY и BZ
(смотри рисунок справа вверху). Вектор нормали определяется
компонентами NX, NY и NZ
Базисный вектор определяет направление оси X на наклоненной
плоскости обработки, вектор нормали определяет направление
плоскости обработки и лежит перпендикулярно.
Обратите внимание перед программированием
УЧПУ расчитывает внутреннее нормированные
векторы из введенных значений.
Описание параметров для поведения при
позиционировании: Смотри “Определить поведение