Прямая lp круговая траектория cp вокруг полюса cc, Странице 254 – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-03)
Страница 254
254
6 Программирование: программирование контуров
6.5
Движ
ения
по
траект
ории
–
по
лярные
к
оор
динаты
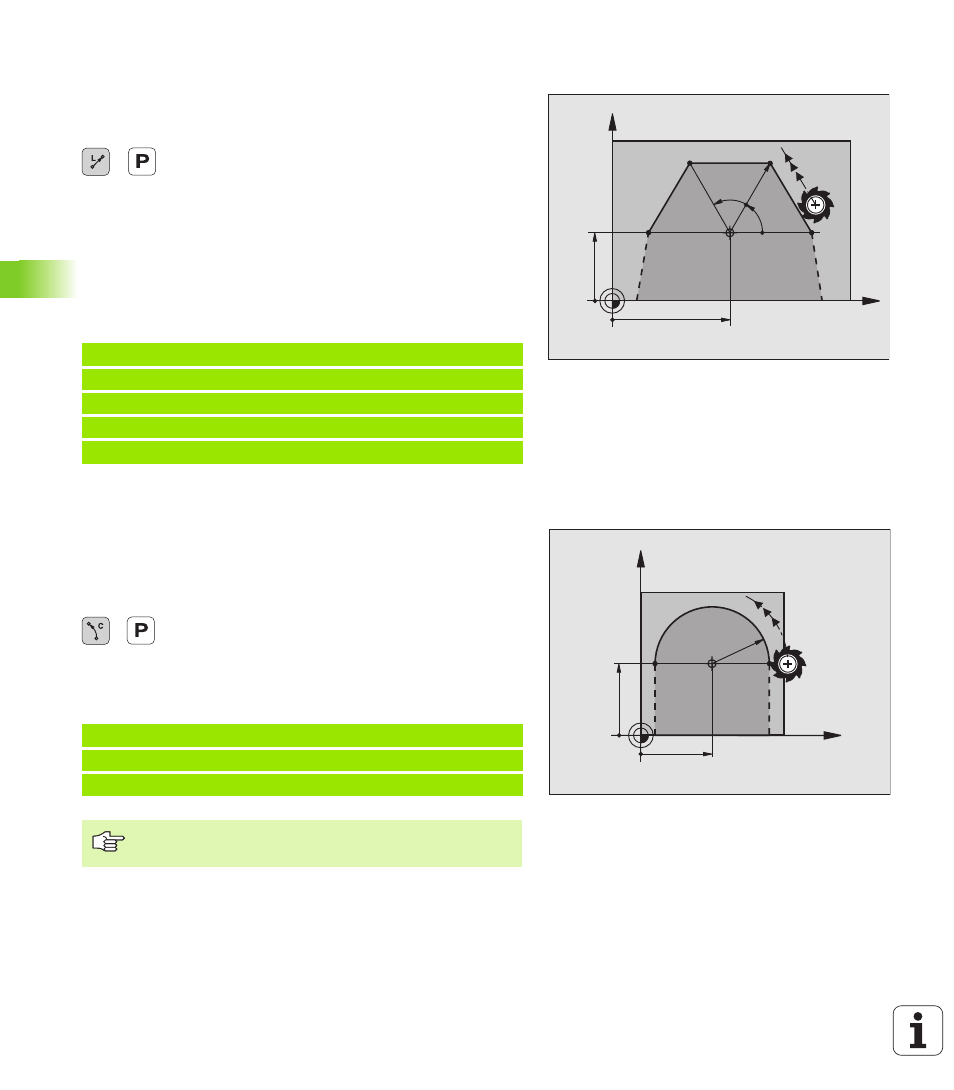
Прямая LP
Инструмент перемещается по прямой от своей актуальной
позиции к конечной точке прямой. Точка старта является
конечной точкой предыдущего кадра.
8
Полярные координаты-радиус PR: Ввод
расстояния конечной точки прямой от полюса CC
8
Полярные координаты-угол PA: Положение угла
конечной точки прямой между –360° и +360°
Знак числа PA установлен базовой осью угла:
Угол между базовой осью угла и PR против часовой стрелки:
PA>0
Угол между базовой осью угла и PR по часовой стрелке: PA<0
ЧУ-кадры в качестве примера
Круговая траектория CP вокруг полюса CC
Радиус с полярными координатами PR является одновременно
радиусом дуги окружности. PR установлен через расстояние
точки старта к полюсу CC. Программированная в последнюю
очередь позиция инструмента перед CP-кадром является точкой
старта круговой траектории.
8
Полярные координаты-угол PA: Положение угла
конечной точки круговой траектории между -5400°
и +5400°
8
Направление вращения DR
ЧУ-кадры в качестве примера
X
Y
45
25
60°
60°
30
CC
12 CC X+45 Y+25
13 LP PR+30 PA+0 RR F300 M3
14 LP PA+60
15 LP IPA+60
16 LP PA+180
X
Y
25
25
R20
CC
18 CC X+25 Y+25
19 LP PR+20 PA+0 RR F250 M3
20 CP PA+180 DR+
В случае инкрементных координат ввести тот же
самый знак числа для DR PA.