1 основы, 1 основы 4.1 основы, Устройства измерения перемещения и опорные метки – Инструкция по эксплуатации HEIDENHAIN TNC 426 (280 476)
Страница 61: Базовая система (система отнесения)
34
4 Программирование: основы, управление файлами, подсказки для программирования, управление палетами
4.
1
Основы
4.1 Основы
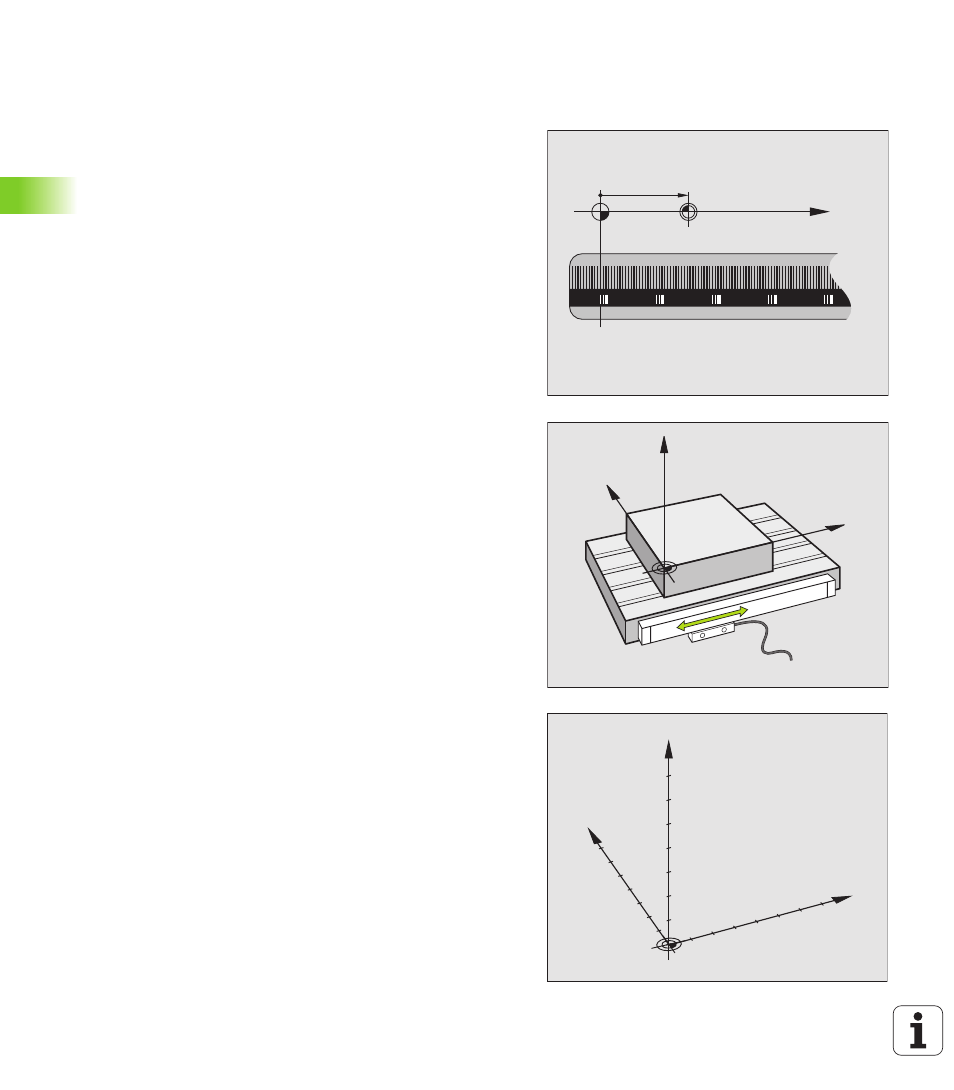
Устройства измерения перемещения и
опорные метки
На направляющих находятся устройства измерения
перемещений, которые регистрируют положения стола станка а
также инструмента. Если направляющая перемещается,
принаделжащее к ней устройство измерения перемещений
производить электрический сигнал, на основании которого УЧПУ
расчитывает точное фактическое положение напраляющей.
В случае перерыва в электропитании затрачивается сочетание
между положением суппорта и расчитанным фактическим
положением. Для возпроизведения этого сочетания, шкалы
устройств измерения перемещений распологают опорными
метками. В случае прохода опорной метки УЧПУ получает сигнал,
обозначающий жёсткую базовую точку станка. Таким образом
УЧПУ в состоянии возпроизвести сочетание фактического
положения и актулаьного положения суппорта.
Как правило на линейных осях смонтрованы устройства для
измерения длин (длиномеры). На круглых столах и на наклонных
осях смонтрованы приборы измерения угла. Для
воспроизведения сочетания фактического положения и
актуального положения суппорта, Вы должны в случае
длиномеров с кодированным расстоянием опорных меток
переместить направляющие на максимально 20 мм, в случае
проиборов измерения угла на максимально 20°.
Базовая система (система отнесения)
С помощью базовой системы Вы определяете однозначно
положения на данной плоскости или в данном пространстве.
Указание позиции относится всегда к определённой точке и
описывается с помощью координат.
В прямоугольной системе (декартовая система) три направления
определены как оси X, Y и Z. Оси лежат перпендикулярно друг к
другу и пересекаются в одном пункте, в нулевом пункте.
Координата указывает расстояние от нулевой точки в одном из
этих направлений. Таким образом описывается положение на
плоскости с помощью двух координат и тремя координатами в
пространстве.
Координаты относящиеся к нулевой точке, обозначается как
абсолютные координаты. Относительные координаты относятся к
довольной другой позиции (базовая точка) с системе координат.
Значения относительных координат обозначаются как
инкрементные значения координат.
X (Z,Y)
X
MP
Y
X
Z
Y
X
Z