7 движения по траектории – spline-интерполяция, Применение – Инструкция по эксплуатации HEIDENHAIN TNC 426 (280 476)
Страница 205
178
6 Программирование: программирование контуров
6.7
Движ
ения
по
траект
о
рии
– Spline-
интерпо
л
яция
6.7 Движения по траектории –
Spline-интерполяция
Применение
Контуры, описанные в системе САПР как Splines, можете
передавать непосредственно в УЧПУ и отработать. УЧПУ
распологает Spline-интерполятором, с помощью которого могут
отрабатываться полиномы третьей степени в двух, трёх, четырёх
или пяти осях.
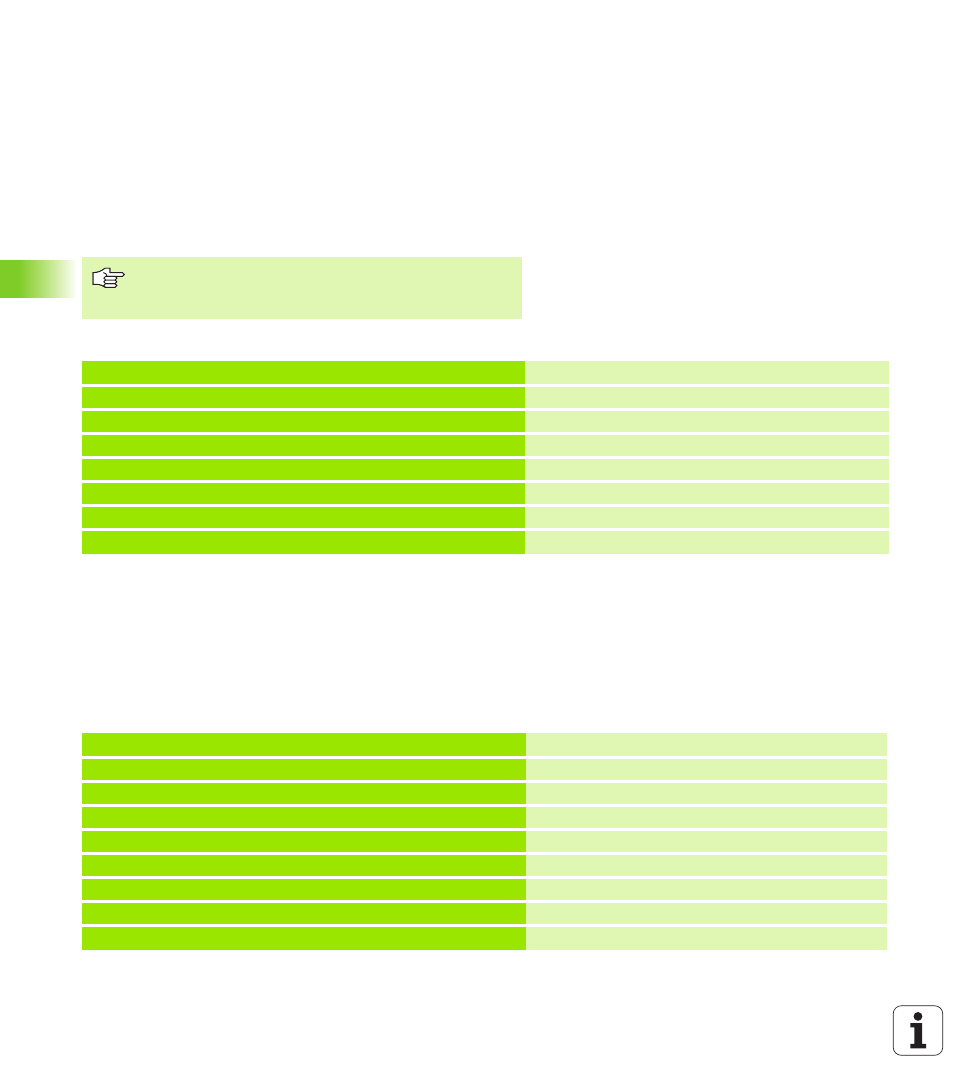
Пример: формат предложения для двух осей
УЧПУ отрабатывает Spline-предложение согласно полиномам
третьей степени:
X(t) = K3X я t
3
+ K2X · t
2
+ K1X · t + X
Z(t) = K3Z я t
3
+ K2Z · t
2
+ K1Z · t + Z
При это переменная t пробегает от 1 до 0. Величина шага t
зависит от подачи и от длины Spline.
Пример: формат предложения для пяти осей
Spline-предложений не можете редактировать в
УЧПУ. Исключение: Подача F и дополнительная
функция M в Spline-предложении.
7 L X+33,909 Z+75,107 F MAX
Spline-начальная точка
8 SPL X+39,824 Z+77,425
Spline-конечная точка
K3X+0,0983 K2X-0,441 K1X-5,5724
Spline-параметры для X-оси
K3Z+0,0015 K2Z-0,9549 K1Z+3,0875 F10000
Spline-параметры для Z-оси
9 SPL X+44,862 Z+73,44
Spline-конечная точка
K3X+0,0934 K2X-0,7211 K1X-4,4102
Spline-параметры для X-оси
K3Z-0,0576 K2Z-0,7822 K1Z+4,8246
Spline-параметры для Z-оси
10 ...
7 L X+33,909 Y-25,838 Z+75,107 A+17 B-10,103 F MAX
Spline-начальная точка
8 SPL X+39,824 Y-28,378 Z+77,425 A+17,32 B-12,75
Spline-конечная точка
K3X+0,0983 K2X-0,441 K1X-5,5724
Spline-параметры для X-оси
K3Y-0,0422 K2Y+0,1893 K1Y+2,3929
Spline-параметры для Y-оси
K3Z+0,0015 K2Z-0,9549 K1Z+3,0875
Spline-параметры для Z-оси
k3A+0,1283 K2A-0,141 K1A-0,5724
Spline-параметры для A-оси
k3B+0,0083 K2B-0,413 E+2 K1B-1,5724 E+1 F10000
Spline-параметры для B-оси
Экспонениальный способ записи
9 ...