Базовая система на фрезерных станках, 1 основы – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-03) ISO programming
Страница 105
HEIDENHAIN iTNC 530
105
4.1
Основы
Базовая система на фрезерных станках
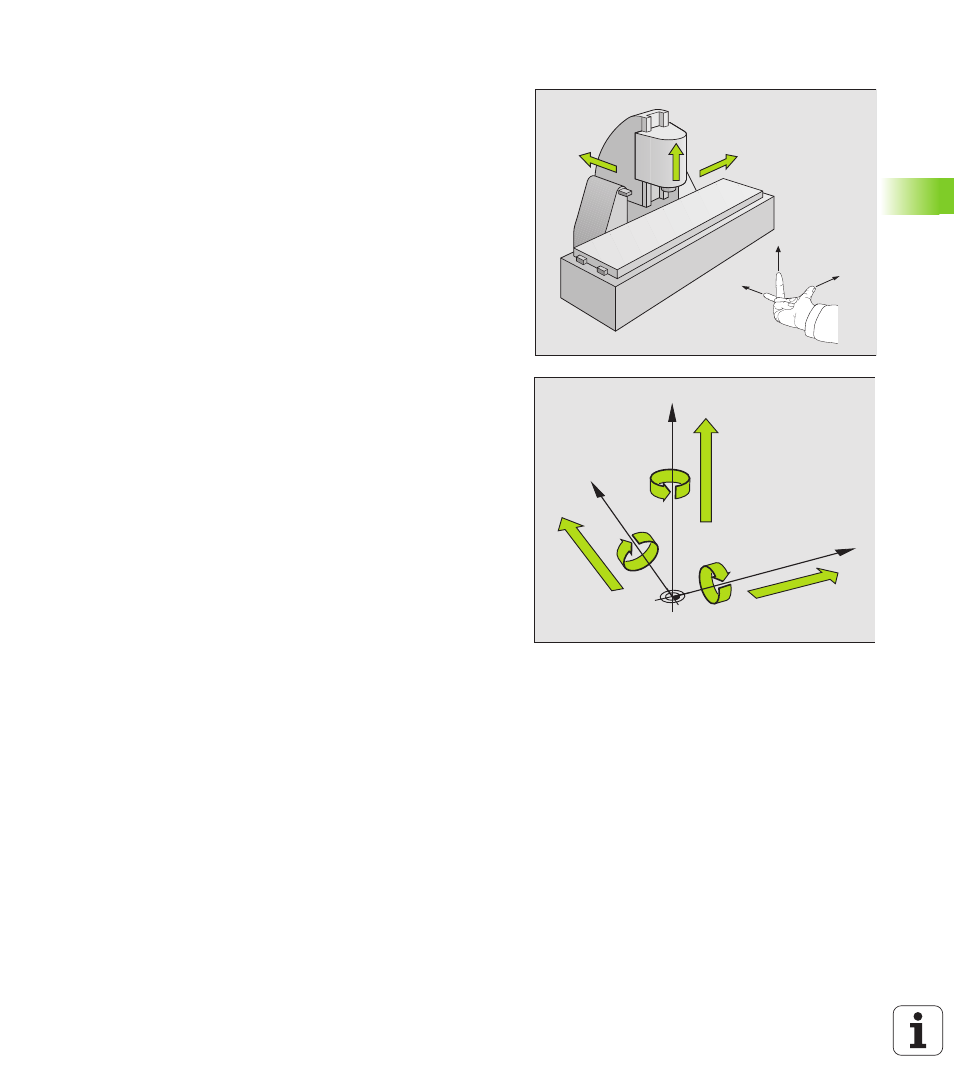
При обработке загатовки на фрезерном станке оператор
относится принципяльно к прямоугольной системе координат.
Рисунок справа показывает, как распределяется прямоугольная
система координат в соотношении к рабочим органам. Принцип
трех пальцев правой руки служит как помощь: Если средний
палец показывает в направлении оси инструмента от загатовки к
инструменту, то он показывает в направлении Z+, большой палец
в направлении X+ и указательный палец в направлении Y+.
iTNC 530 может управлять вообщем максимально 9 осями. Кроме
главных осей X, Y и Z существуют лежащие параллельно
вспомогательные оси U, V и W. Поворотные оси обозначается с
помощью A, B и C. Рисунок справа указует распределение
вспомогательных осей и поворотных осей в соотношении к
главным осьям.
+X
+Y
+Z
+X
+Z
+Y
W+
C+
B+
V+
A+
U+
Y
X
Z