Странице 55 – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-03) Touch Probe Cycles
Страница 55
HEIDENHAIN iTNC 530
55
3.1
Ав
то
м
атиче
ск
ое
определ
ение
крив
ог
о
по
л
о
ж
е
ния
де
тали
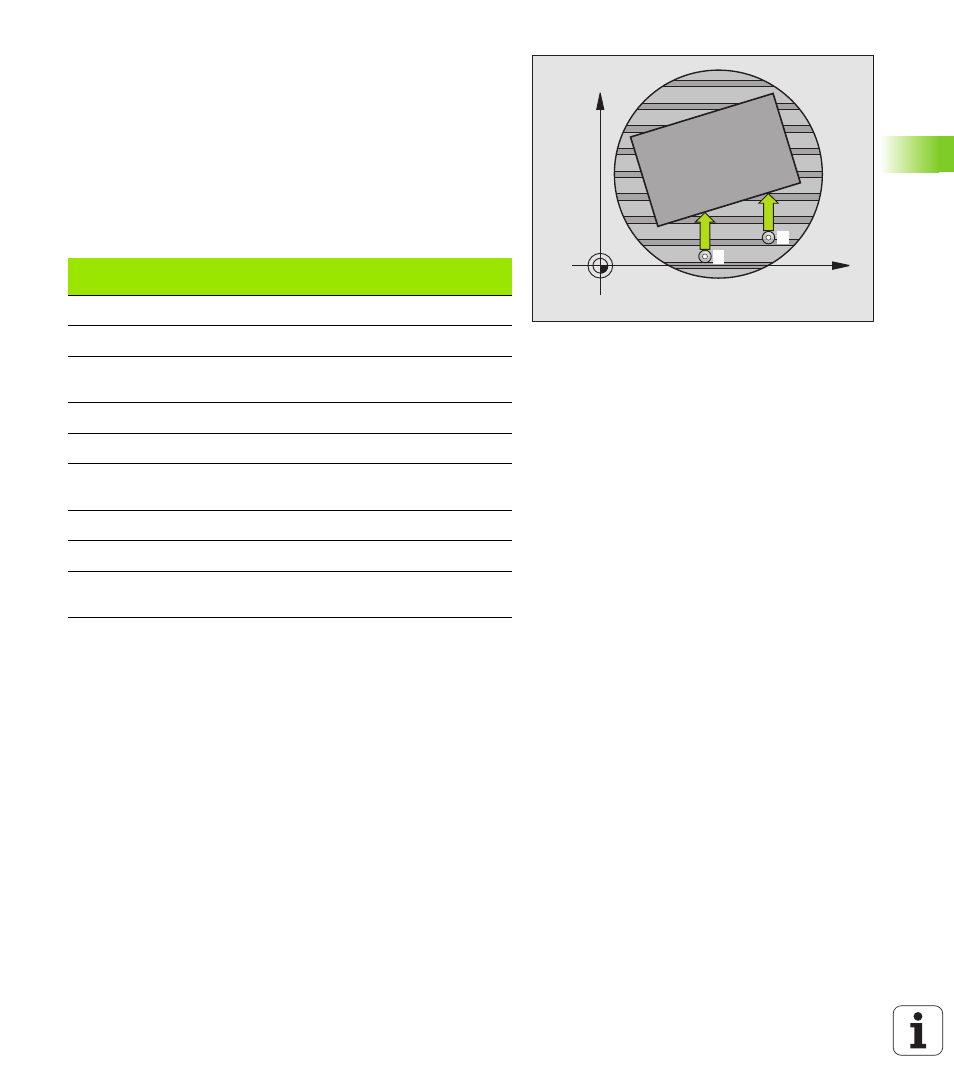
ПОВОРОТ ФОНА компенсировать через ось
поворота (цикл зонда 403, DIN/ISO: G403)
Цикл умпульсного зонда 403 определяет путем измерения двух
точек, которые должны лежать на одной прямой, кривое
положение детали. Определенное кривое положение детали
УЧПУ компенсирует вращением оси A, B или C. Деталь
зажимается при этом произвольно на столе станка.
Ниже описанные комбинации оси измерения (параметр цикла
Q272) и компенсирующей оси (параметр цикла Q312)
разрешаются. Функция наклона плоскости обработки:
1 УЧПУ позиционирует зонд на ускоренном ходе (значение из
MP6150 или MP6361) с помощью логики позиционирования
(смотри “Отработка циклов импульсной системы” на странице
24) к программированной точке контактирования
1
. При этом
УЧПУ смещает зонда на безопасное расстояние против
определенному направлению перемещения
2 Затем зонд перемещается на заданную высоту измерения и
производит первую операцию контактирования с подачей
контактирования (MP6120 или MP6360)
3 Потом зонд перемещается к следующей точке
контактирования
2
и осуществляет вторую операцию
контактирования
X
Y
1
2
Активная ось
зонда (TS)
Ось измерения
Компенсирующая
ось
Z
X (Q272=1)
C (Q312=6)
Z
Y (Q272=2)
C (Q312=6)
Z
Z (Q272=3)
B (Q312=5) или A
(Q312=4)
Y
Z (Q272=1)
B (Q312=5)
Y
X (Q272=2)
C (Q312=5)
Y
Y (Q272=3)
C (Q312=6) или A
(Q312=4)
X
Y (Q272=1)
A (Q312=4)
X
Z (Q272=2)
A (Q312=4)
X
X (Q272=3)
B (Q312=5) или С
(Q312=6)