Странице 130, 3 ав то м атиче ск ое из мерение за га то во к – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (340 49x-03) Touch Probe Cycles
Страница 130
130
3 Циклы импульсной системы для автоматического контроля загатовки
3.3
Ав
то
м
атиче
ск
ое
из
мерение
за
га
то
во
к
ИЗМЕРЕНИЕ МОСТИК НАРУЖИЕ
(цикл зонда 426, DIN/ISO: G426)
Цикл 426 определяет длину и ширину мостика. Если дефинируете
соответственные значения допуска в цикле, то УЧПУ
осуществляет сравнение заданное-фактическое и записывает это
отклонение в системных параметрах.
1 УЧПУ позиционирует зонд на ускоренном ходе (значение из
MP6150 или MP6361) с помощью логики позиционирования
(смотри “Отработка циклов импульсной системы” на странице
24) к точке контактирования
1
. УЧПУ расчитывает точки
контактирования из данных в цикле и на основании
безопасного расстояния из MP6140
2 Затем зонд перемещается на заданную высоту измерения и
производит первую операцию контактирования с подачей
контактирования (MP6120 или MP6360). 1. Зондирование
всегда в отрицательном направлении программированной оси
3 Потом зонд перемещается на безопасную высоту к
следующей точке контактирования и осуществляет вторую
операцию контактирования
4 Затем УЧПУ позиционирует зонд обратно на безопасную
высоту и записывает фактические значения а также
отклонение в следующих параметрах Q.
8
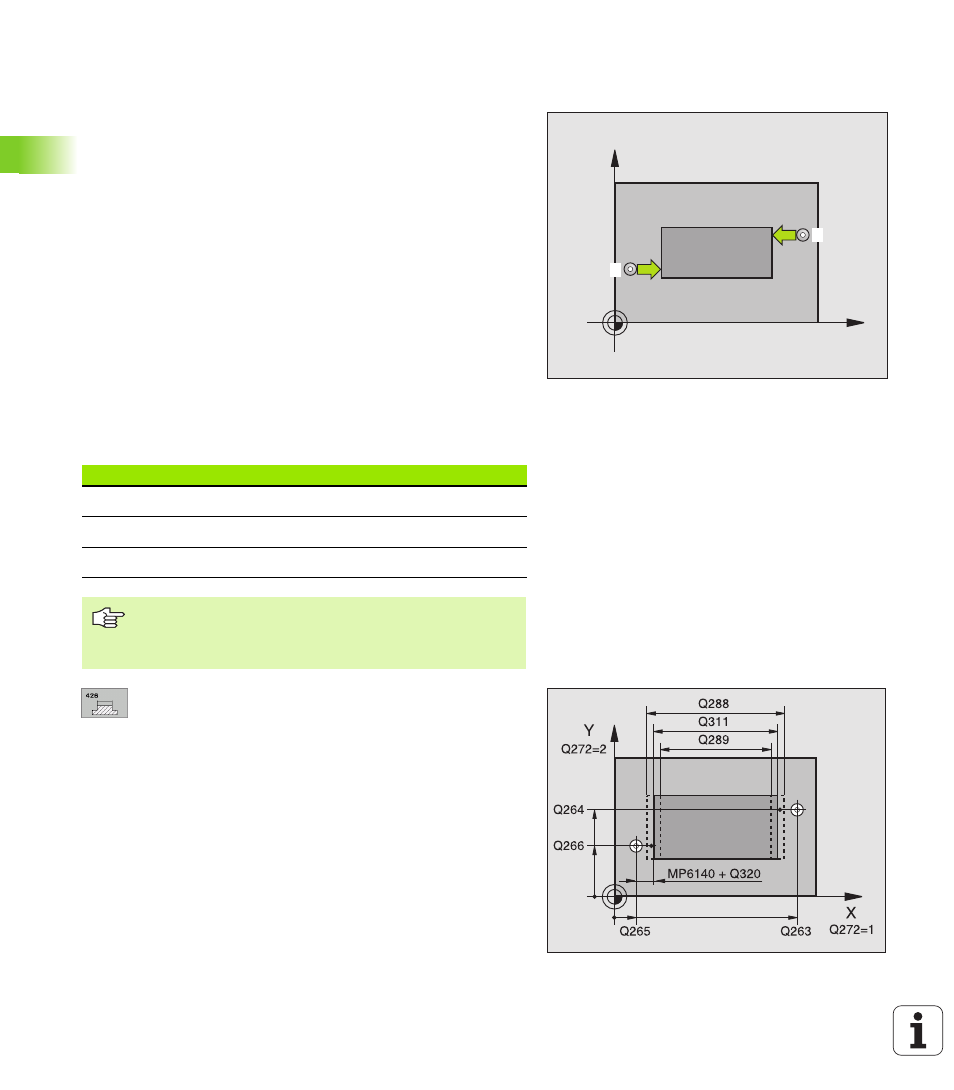
1.точка измерения 1-ой оси Q263 (абсолютно):
Координата первой точки контактирования на
главной оси плоскости обработки
8
1.точка измерения 2-ой оси Q264 (абсолютно):
Координата первой точки контактирования на
вспомогательной оси плоскости обработки
8
2.точка измерения 1-ой оси Q265 (абсолютно):
Координата второй точки контактирования на
главной оси плоскости обработки
8
2.точка измерения 2-ой оси Q266 (абсолютно):
Координата второй точки контактирования на
вспомогательной оси плоскости обработки
X
Y
1
2
Номер параметра
Значение
Q156
Факт-значение измеренная длина
Q157
Факт-значение положение средняя ось
Q166
Отклонение измеренной длины
Обратите внимание перед программированием
Перед дефиницией цикла следует программировать
вызов инструмента для определения оси зонда.