1 основные положения, Датчики положения и референтные метки, Система привязки – Инструкция по эксплуатации HEIDENHAIN TNC 640 (34059x-02) ISO programming
Страница 88: Основные положения
Программирование: основы, управление файлами
3.1
Основные положения
3
88
TNC 640 | Руководство пользователя «Программирование DIN/ISO» | 12/2013
3.1
Основные положения
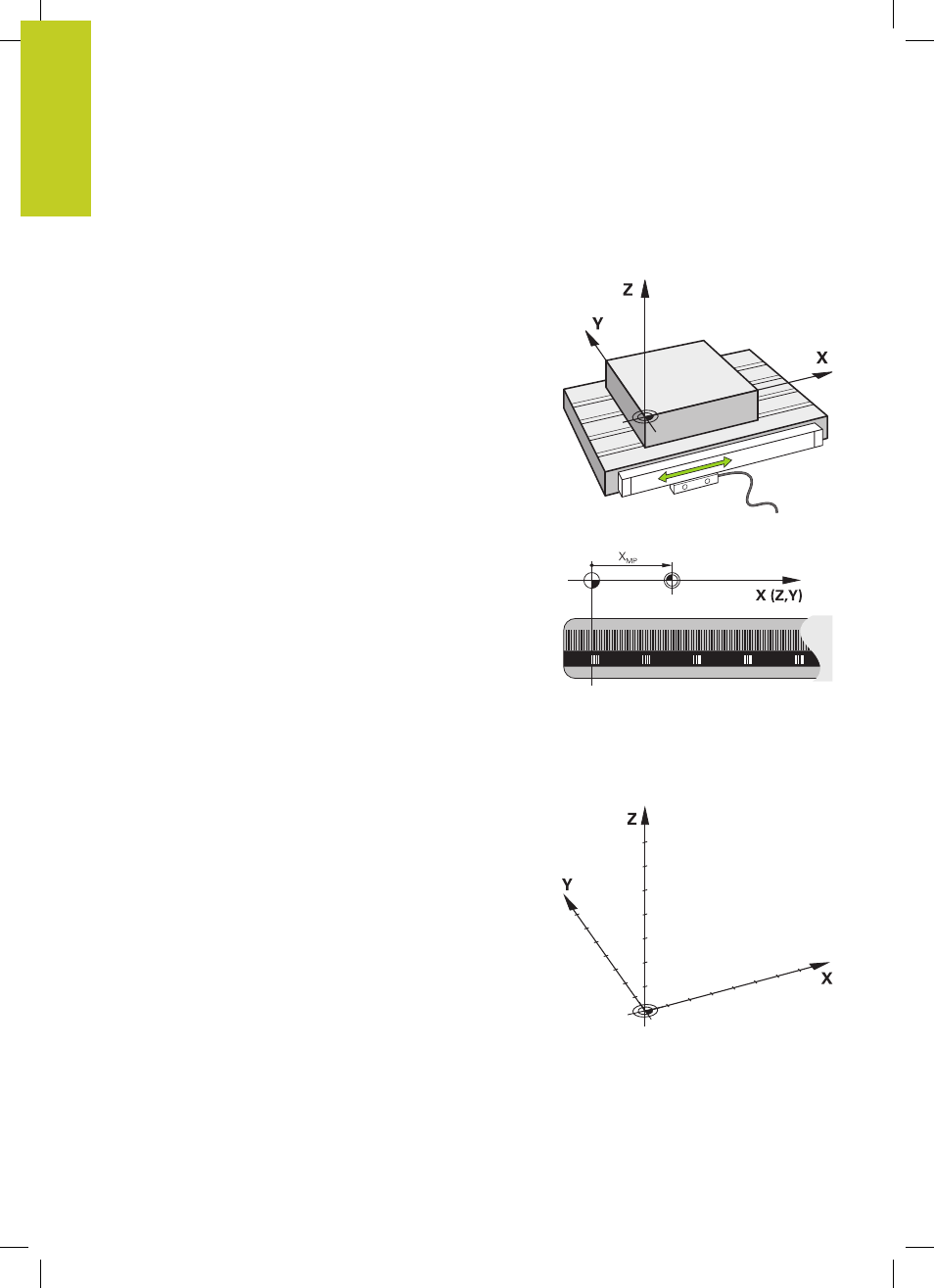
Датчики положения и референтные метки
На осях станка находятся датчики положения, которые
регистрируют положение стола станка или инструмента. На
линейных осях, как правило, монтируются датчики линейных
перемещений, на круглых столах и осях поворота - угловые
датчики.
При перемещении оси станка относящийся к ней датчик
положения генерирует электрический сигнал, на основании
которого система ЧПУ рассчитывает точное фактическое
положение оси станка.
При перерыве в электроснабжении связь между положением
направляющей станка и рассчитанной фактической
координатой теряется. Для восстановления этой
связи инкрементальные датчики положения снабжены
референтными метками. При пересечении референтной метки
система ЧПУ получает сигнал, обозначающий фиксированную
точку привязки. Таким образом, система ЧПУ восстанавливает
абсолютное значение положения осей. При использовании
датчиков линейных перемещений с кодированными
референтными метками оси станка необходимо переместить
на расстояние не более 20 мм, в случае датчиков угла - не
более чем на 20°.
При наличии абсолютных датчиков положения после
включения абсолютное значение положения передается в
систему управления. Таким образом, сразу после включения
станка без перемещения его осей восстанавливается
абсолютное положение всех датчиков линейных перемещений.
Система привязки
С помощью системы привязки однозначно определяются
координаты положения на какой-либо плоскости или в
пространстве. Данные положения всегда относятся к
определенной точке и описываются посредством координат.
В декартовой системе координат три направления определены
как оси X, Y и Z. Оси расположены взаимно перпендикулярно
и пересекаются в одной точке - нулевой. Координата задает
расстояние от нулевой точки в одном из этих направлений.
Следовательно, положение на плоскости можно описать двумя
координатами, а в пространстве - тремя координатами.
Координаты, относящиеся к нулевой точке, обозначаются
как абсолютные координаты. Относительные координаты
принадлежат любой другой позиции (точке привязки) в системе
координат. Значения относительных координат обозначаются
как инкрементальные значения координат.