Важные позиции при входе и выходе, Вход в контур и выход из контура 6.3 – Инструкция по эксплуатации HEIDENHAIN TNC 640 (34059x-04)
Страница 211
Вход в контур и выход из контура
6.3
6
TNC 640 | Руководство пользователя "Диалог открытым текстом HEIDENHAIN" | 8/2014
211
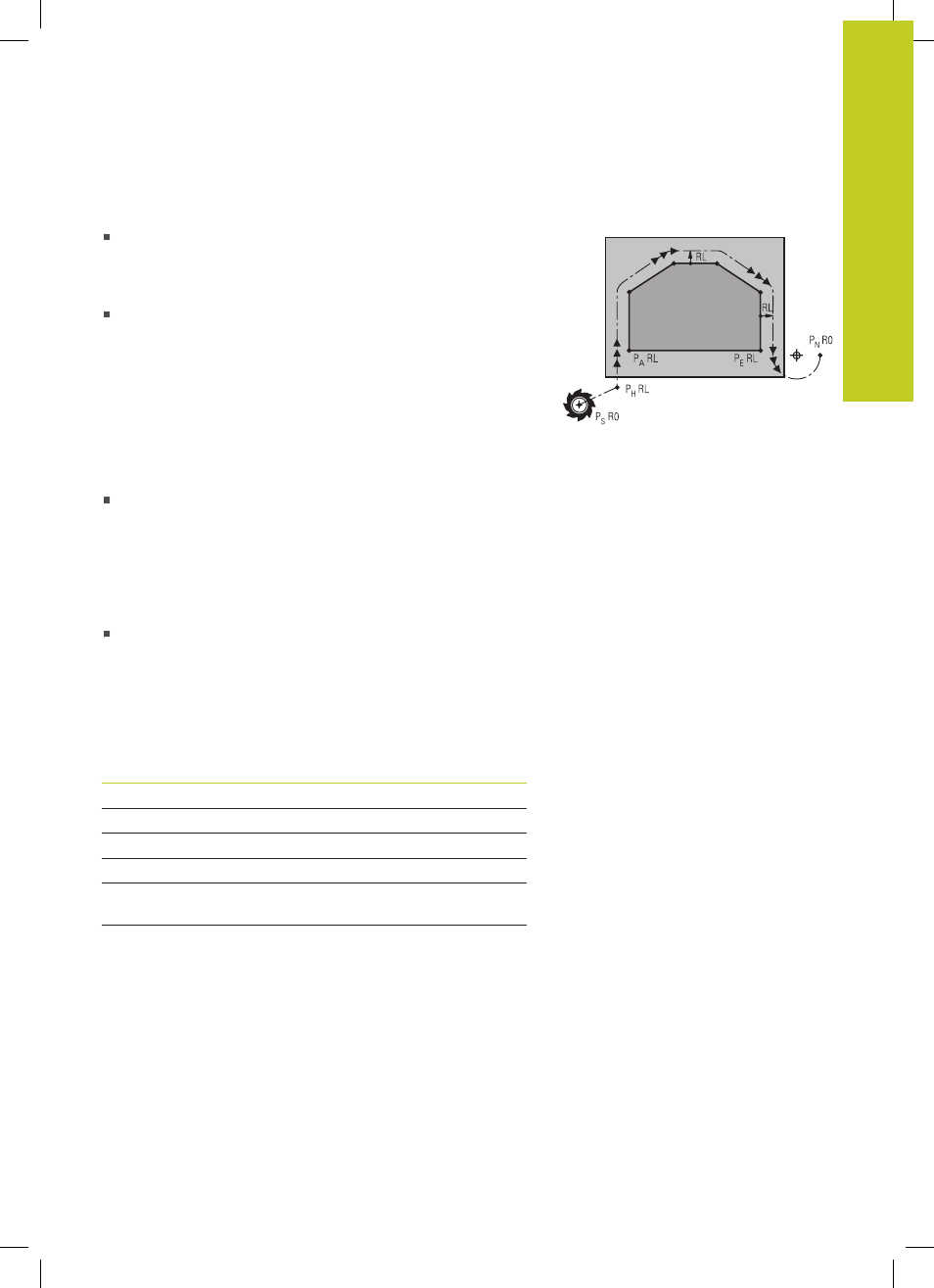
Важные позиции при входе и выходе
Начальная точка P
S
Эта точка программируется непосредственно перед APPR-
кадром. P
S
лежит вне контура, и подвод к ней выполняется
без поправки на радиус (R0).
Вспомогательная точка P
H
Подвод и отвод для некоторых форм траектории
выполняется через вспомогательную точку P
H
, координаты
которой система ЧПУ рассчитывает, исходя из данных
APPR- и DEP-кадров. Система ЧПУ перемещает от текущей
позиции к вспомогательной точке P
H
, заданной в последней
подаче. Если точка была запрограммирована в последнем
кадре позиционирования перед функцией подвода FMAX
(позиционирование на ускоренном ходу), то ЧПУ выполняет
подвод к вспомогательной точке P
H
на ускоренном ходу.
Первая точка контура P
A
и последняя точка контура P
E
Первая точка контура P
A
программируется в APPR-кадре,
последняя точка контура P
E
– при помощи любой функции
траектории. Если APPR-кадр содержит также Z-координату,
система ЧПУ перемещает инструмент сначала в плоскости
обработки в точку P
H
, а затем на заданную глубину по его
оси.
Конечная точка P
N
Позиция P
N
лежит вне контура и рассчитывается из данных
DEP-кадра. Если DEP-кадр также содержит Z-координату, то
система ЧПУ перемещает инструмент сначала в плоскости
обработки в точку P
N
, а затем поднимает на заданную
высоту по его оси.
Краткое
обозначение
Значение
APPR
англ. APPRoach = подвод
DEP
англ. DEParture = отвод
L
англ. Line = прямая
C
англ. Circle = окружность
T
Тангенциальный (плавный переход,
по касательной)
N
Нормаль (перпендикуляр)