Компенсация погрешностей, Компенсация линейной погрешности, Ii – 2 настройки систе м ы – Инструкция по эксплуатации HEIDENHAIN ND 522
Страница 77
ND 780
77
II – 2
Настройки
систе
м
ы
Компенсация погрешностей
Расстояние, пройденное режущим инструментом и отображаемое
на дисплее, не всегда соответствует фактическому пути. Ошибка
шага привода, прогибание или наклон оси приводят к
погрешностям. Эта погрешность может быть линейной или
нелинейной. Ее можно определить с помощью прибора для
сравнительных измерений, например, VM 101 фирмы
HEIDENHAIN или с помощью концевых мер. Из анализа
погрешностей можно определить, какую компенсацию
необходимо использовать, линейную или нелинейную.
ND 522/523 позволяет компенсировать погрешности. Для каждой
оси можно выбрать свой тип компенсации.
Компенсация линейной погрешности
Компенсацию линейной погрешности можно применять в том
случае, если есть сравнительные измерения, подтверждающие
погрешность линейности на всей измеряемой длине.
Погрешность в этом случае может быть скомпенсирована
числовым путем с помощью коэффициента. Смотри Рис. II.7 &
Рис. II.8
Если погрешность датчика известна, она может быть введена
вручную. Нажмите клавишу Softkey ТИП для выбора
ЛИНЕЙНОЙ компенсации.
Введите коэффициент компенсации в ppm и нажмите Enter.
Компенсация погрешностей возможна только для
датчиков линейных перемещений.
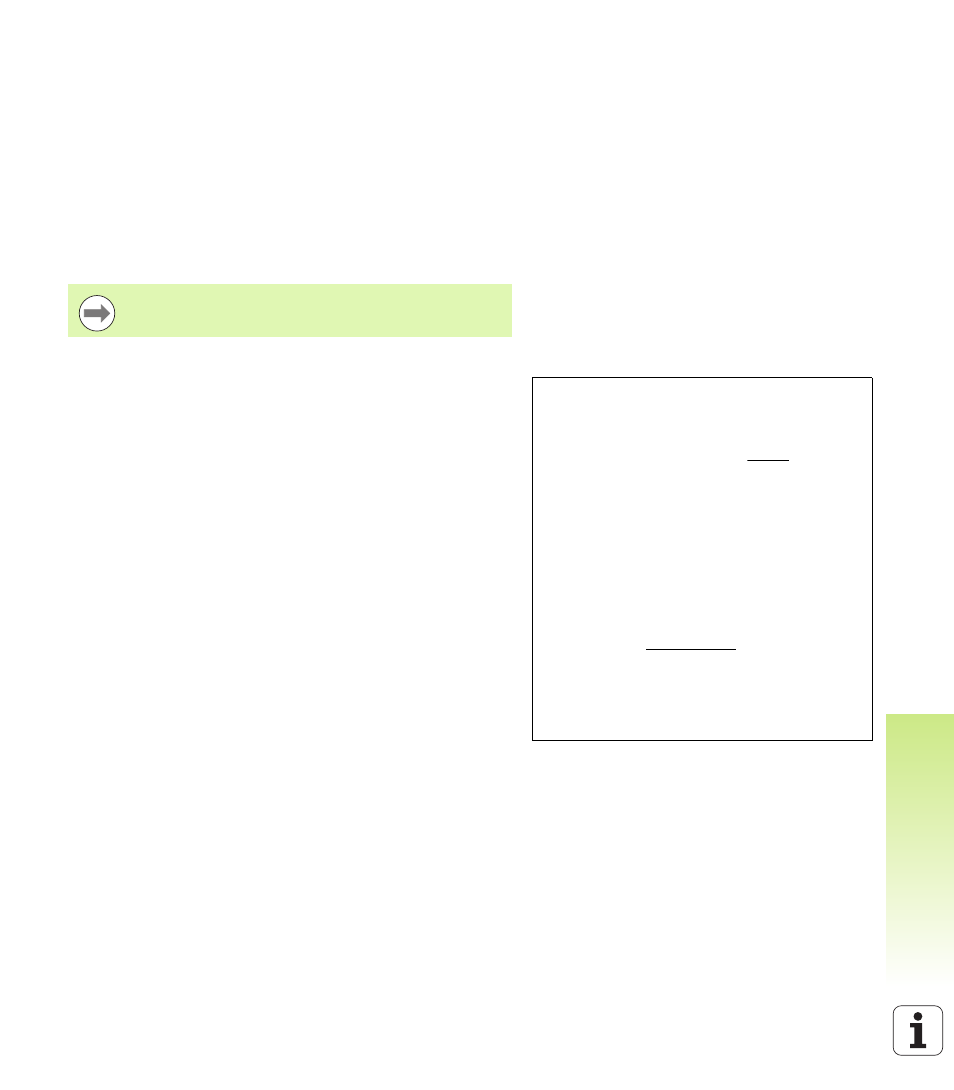
Рис. II.7 Формула подсчета компенсации
линейной погрешности
Для рассчета компенсации линейной
погрешности используйте слудующую
формулу:
Коэфф. компенсации LEC =
где
S = длина, измеренная эталонным
датчиком
M = длина измеренная датчиком на оси
Пример
Если длина, измеренная эталонным датчиком
составляет 500 мм, а датчик оси X-измерил
499,95мм, то коэффициент компенсации LEC
для оси X- равен 100 parts per million (ppm).
LEC =
LEC = 100 ppm
(округлено до ближайшего
(
)
S – M
M
(
)
500 – 499.95
499.95
x 10
6
ppm