Сигнал полученной механической мощности -31 – Инструкция по эксплуатации Basler Electric DECS-400
Страница 71
После высокочастотной фильтрации сигнал электрической мощности суммируется и
масштабируется, объединяя (используя) постоянную инерции генератора (2Н) и сигнал частоты
вращения. Низкочастотная фильтрация с сумматором управляется постоянной времени TI2.
Параметр TI2 может быть установлен в пределах от 1 до 20 секунд с шагом 0.01 секунд.
Постоянная инерции "H" может регулироваться в пределах от 1 до 25 МВт-с/МВ∙А. с шагом 0.01
МВт-с/МВ∙А. Установка параметров TI2 и "H" осуществляется при помощи экрана Системный
стабилизатор, Параметры ПО BESTCOMS.
Рисунок 3-17. Сигнал электрической мощности генератора
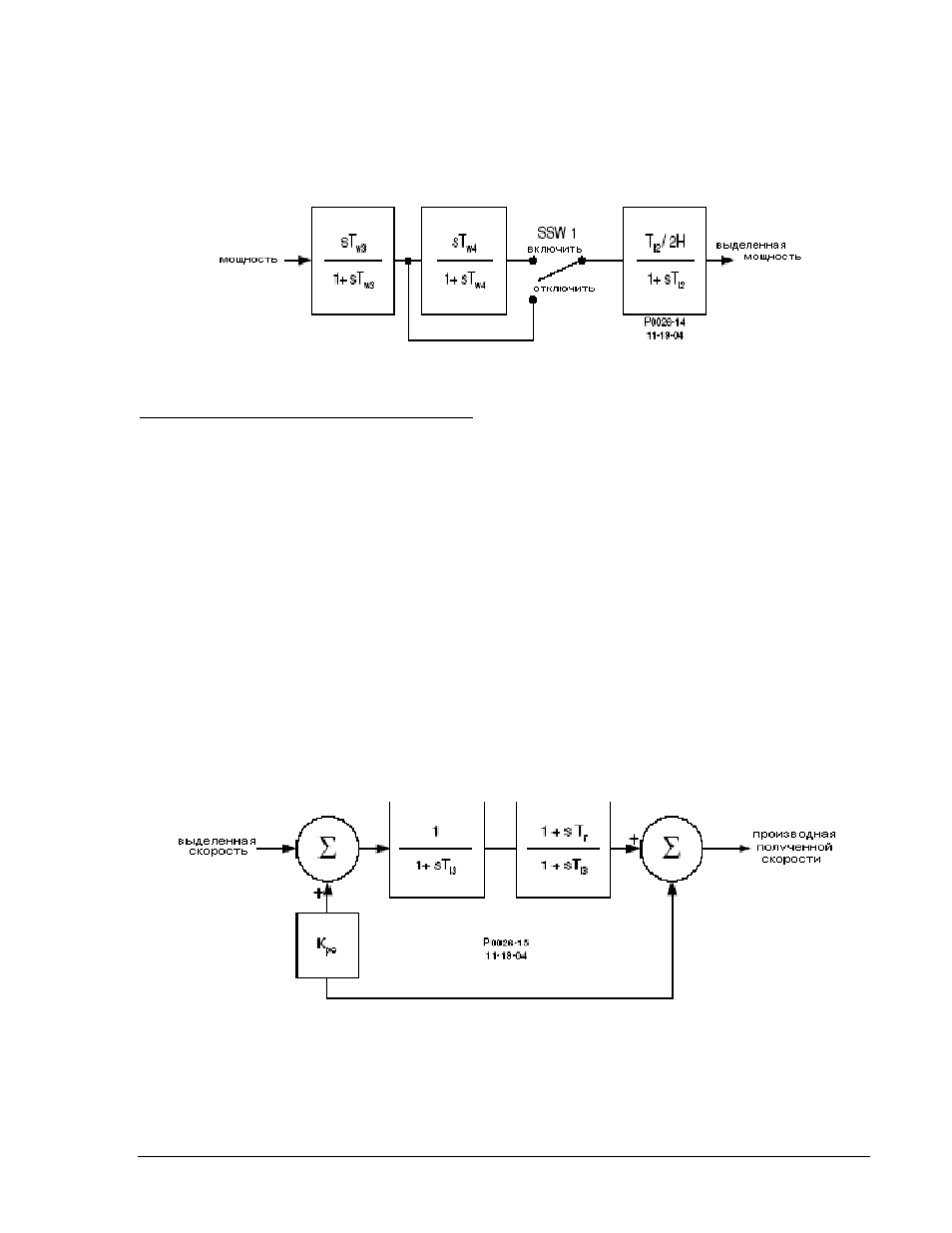
Сигнал полученной механической мощности
Сигнал изменения частоты вращения и суммарный сигнал изменения электрической мощности
используются для получения суммарного сигнала полученной механической мощности.
Для данных целей имеется регулируемый усилительный каскад, который может устанавливаться в
пределах от 0 до 2.00 с шагом 0.01. Установка параметра Kpe осуществляется посредством экрана
Системный стабилизатор, Параметры ПО BESTCOMS.
Затем полученный суммарный сигнал механической мощности проходит через низкочастотный
фильтр механической мощности и следящий фильтр линейного изменения. Низкочастотный
фильтр контролируется постоянной времени TI3 и обеспечивает ослабление компонентов
крутильного колебания в сигнале частоты вращения. Параметр TI3 может устанавливаться в
пределах от 0.05 до 0.20 секунд с шагом 0.01 с. Следящий фильтр линейного изменения
обеспечивает нулевую статическую ошибку линейного изменения в суммарном сигнале
электрической мощности. Это позволяет ограничить вариации выходного сигнала стабилизатора
до низкого уровня для изменений механической мощности, которые обычно имеют место во время
работы генераторов. Следящий фильтр линейного изменения контролируется постоянной времени
Tr.
Параметр Tr может устанавливаться в пределах от 0.05 до 1 секунды с шагом 0.01 секунд.
Установка постоянных времени низкочастотного фильтра и следящего фильтра осуществляется
посредством экрана Системный стабилизатор, Параметры ПО BESTCOMS.
Процесс получения суммарного сигнала механической мощности показан на рисунке 3-18.
Рисунок 3-18. Сигнал механической мощности
9369773990
Rev R1
DECS-400
Функциональное описание
3-31