Инструкция по эксплуатации Basler Electric DECS-400
Страница 105
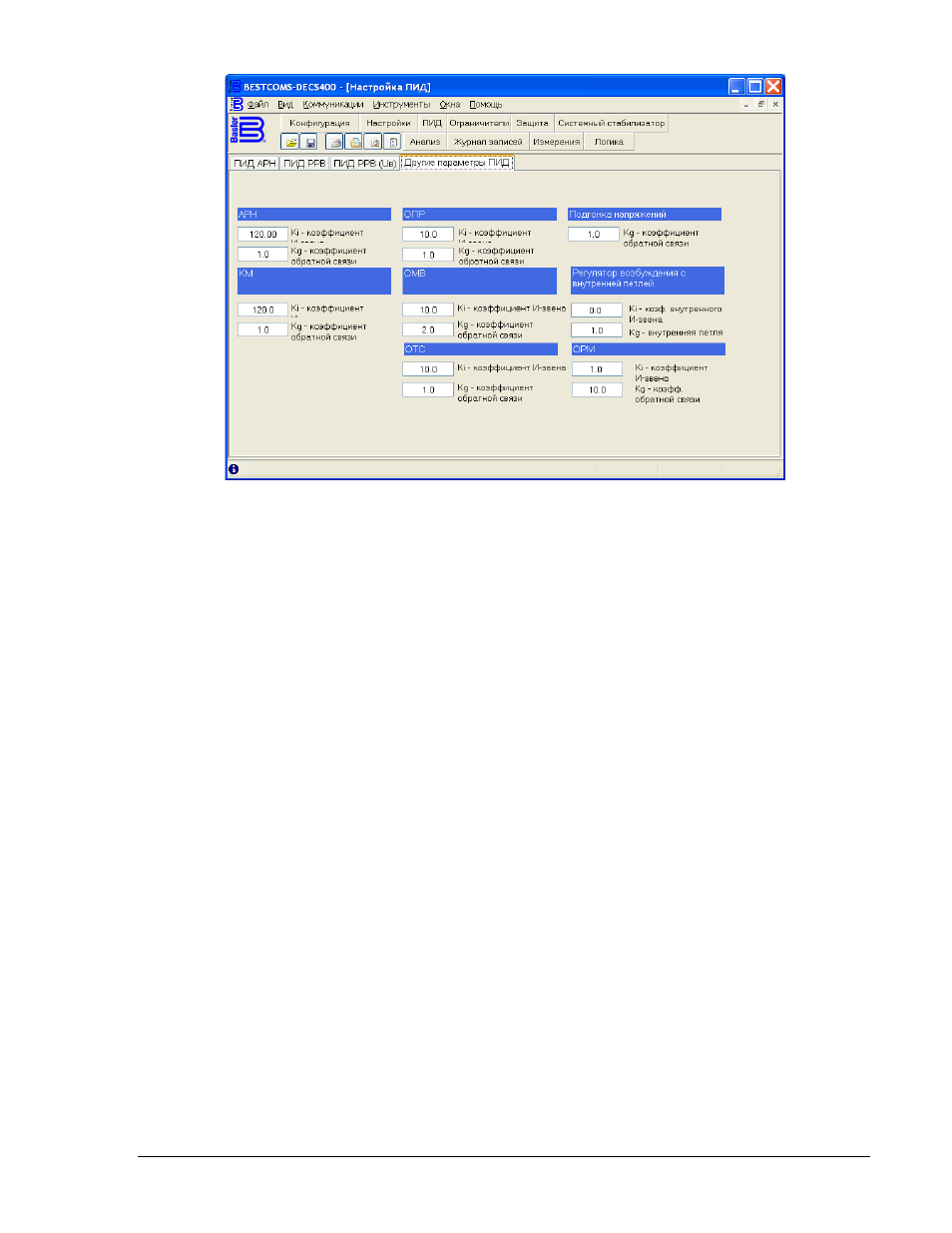
Рисунок 4-20. Экран настроек усиления, закладка других усилений
VAR – Ki-Integral Gain (VAR –
интегральное усиление Ki). Это значение регулирует интегральное
усиление, которое определяет характеристику динамического отклика DECS-400 на изменение
настройки var. Вы можете ввести значение от 0 до 1000 с шагом 0.01.
VAR – Kg-Loop Gain (VAR –
усиление замкнутого контура Kg). Это значение регулирует грубый
уровень усиления замкнутого контура алгоритма PID для контроля var. Вы можете ввести значение
от 0 до 1000 с шагом 0.1.
PF – Ki-Integral Gain (PF –
интегральное усиление Ki). Это значение регулирует интегральное
усиление, которое определяет характеристику динамического отклика DECS-400 на изменение
настройки PF. Вы можете ввести значение от 0 до 1000 с шагом 0.1.
PF – Kg-Loop Gain (PF –
усиление замкнутого контура Kg). Это значение регулирует грубый
уровень усиления замкнутого контура алгоритма PID для контроля PF. Вы можете ввести значение
от 0 до 1000 с шагом 0.1.
OEL – Ki-Integral Gain (OEL –
интегральное усиление Ki). Это значение регулирует скорость, с
которой DECS-400 отвечает в состоянии перевозбуждения. Вы можете ввести значение от 0 до
1000 с шагом 0.1.
OEL – Kg-Loop Gain (OEL –
усиление замкнутого контура Kg). Это значение регулирует грубый
уровень усиления замкнутого контура алгоритма PID для функции ограничения перевозбуждения.
Вы можете ввести значение от 0 до 1000 с шагом 0.1.
UEL – Ki-Integral Gain (UEL –
интегральное усиление Ki). Это значение регулирует скорость, с
которой DECS-400 отвечает в состоянии недостаточного возбуждения. Вы можете ввести значение
от 0 до 1000 с шагом 0.1.
UEL – Kg-Loop Gain (UEL –
усиление замкнутого контура Kg). Это значение регулирует грубый
уровень усиления замкнутого контура алгоритма PID для функции ограничения недостаточного
возбуждения. Вы можете ввести значение от 0 до 1000 с шагом 0.1.
SCL – Ki-Integral Gain (SCL –
интегральное усиление Ki). Это значение регулирует скорость, с
которой DECS-400 ограничивает силу тока статора. Вы можете ввести значение от 0 до 1000 с
шагом 0.1.
SCL – Kg-Loop Gain (SCL –
усиление замкнутого контура Kg). Это значение регулирует грубый
уровень усиления замкнутого контура алгоритма PID для функции ограничения силы тока статора.
Вы можете ввести значение от 0 до 1000 с шагом 0.1.
Voltage Matching – Kg-Loop Gain
(Сравнение напряжений – усиление замкнутого контура Kg). Это
значение позволяет регулировать грубый уровень усиления замкнутого контура алгоритма PID для
9369773990
Rev R1
ПО DECS-400 BESTCOMS™
4-25