Конструкция и принцип действия – Инструкция по эксплуатации Samson 3730-2 Электропневматический позиционер
Страница 10
Конструкция и принцип действия
10
EB 8384-2
3. Конструкция и
принцип действия
Электропневматический
позиционер
устанавливается
на
пневматические
регулирующие клапаны. Он предназначен
для
«привязки»
положения
клапана
(регулируемый параметр «х») к величине
управляющего
сигнала
(задающего
параметра «w»). Управляющий сигнал,
поступающий
из
системы
управления,
сравнивается с величиной хода / угла
поворота регулирующего клапана, и выдает
необходимое
управляющее
давление
(выходной сигнал «y»).
Основные
элементы
позиционера:
электрический
путевой
датчик (2), i/p-
преобразователь 6, работающий в аналоговом
режиме, с включенным за ним усилителем 7, а
также
электронный
модуль
с
микроконтроллером (5).
Стандартный позиционер оснащается тремя
дискретными контактами: выход сообщения об
отказе для станции управления и два
программно конфигурируемых конечных
выключателя используются для индикации
конечных положений клапана.
Положение клапана передается в виде
линейного перемещения или угла поворота
посредством следящего рычага и датчика хода
(2)
сигнал
на
пропорционально-
дифференциальный (PD) контроллер (3).
Одновременно
аналогово-цифровой
преобразователь
(АЦП) (4) передает
положение клапана в микроконтроллер (5). PD
контроллер сравнивает текущее положение с
сигналом постоянного тока (в пределах от 4 до
20 мА), после его преобразования в АЦП (4).
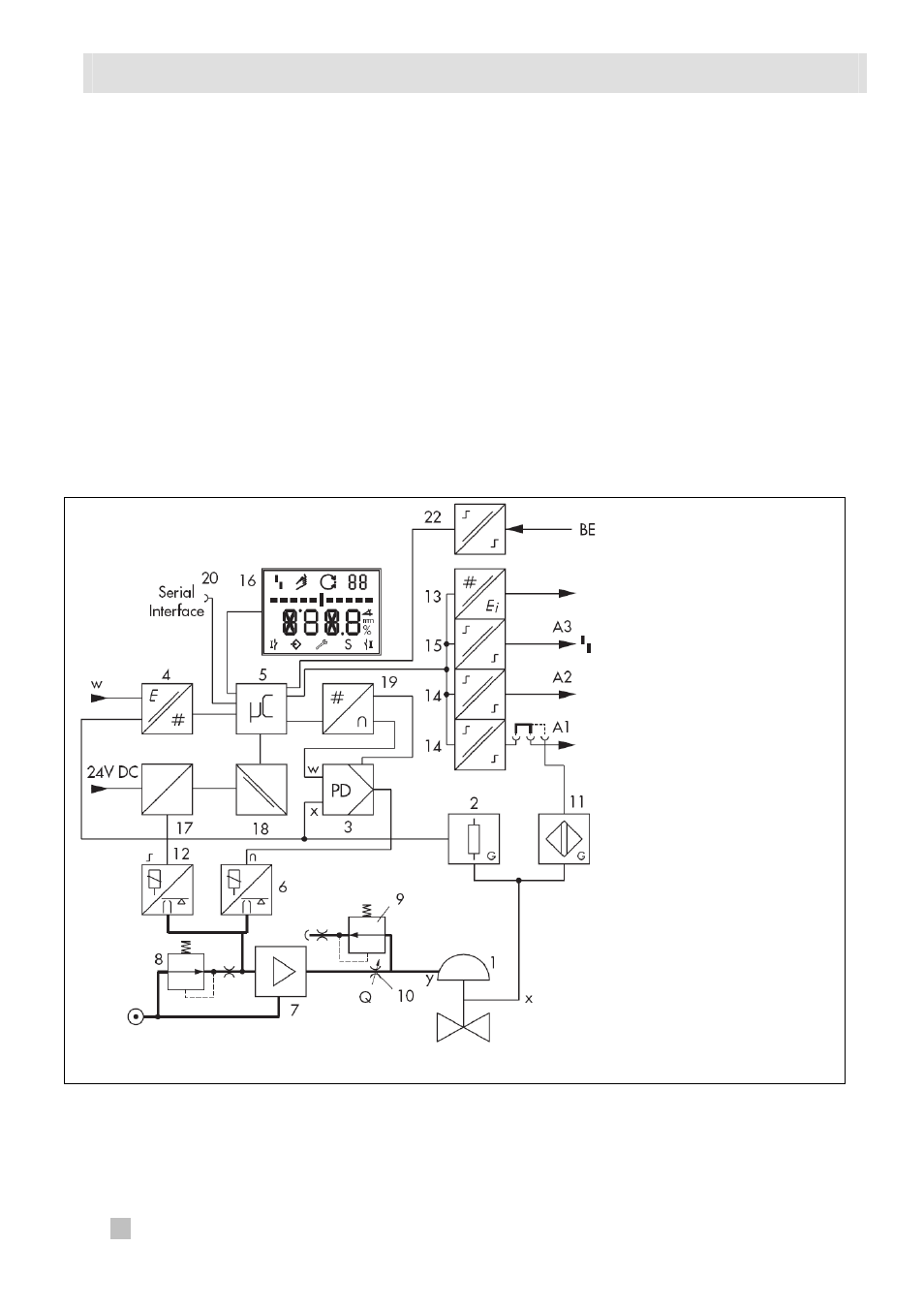
2 • Функциональная схема
1. Регулирующий клапан
2. Путевой датчик
3. PD
-
контроллер
4. АЦП
5. Микроконтроллер
6. I/P
-
преобразователь
7. Пневматический
усилитель
8. Регулятор давления
9. Регулятор расхода
10. Регулятор расхода
11. *Индуктивный конечный
выключатель
12. *Соленоидный клапан
13. *Аналоговый датчик
положения
14. Программируемые
конечные выключатели;
Сигнал 1/2
15. Выход сообщения об
отказе; Сигнал 3
16. ЖК Дисплей
17. *Управление
соленоидным клапаном
18. *Гальваническая развязка
19. ЦАП
20. Интерфейс связи
21. Дискретный ввод ВЕ*
* Опция