3 регулятор процессов, 1 пример применения регулятора процессов, 0v 10v – Инструкция по эксплуатации NORD Drivesystems BU0300
Страница 91: Sollwert istwert, Leitsollwert
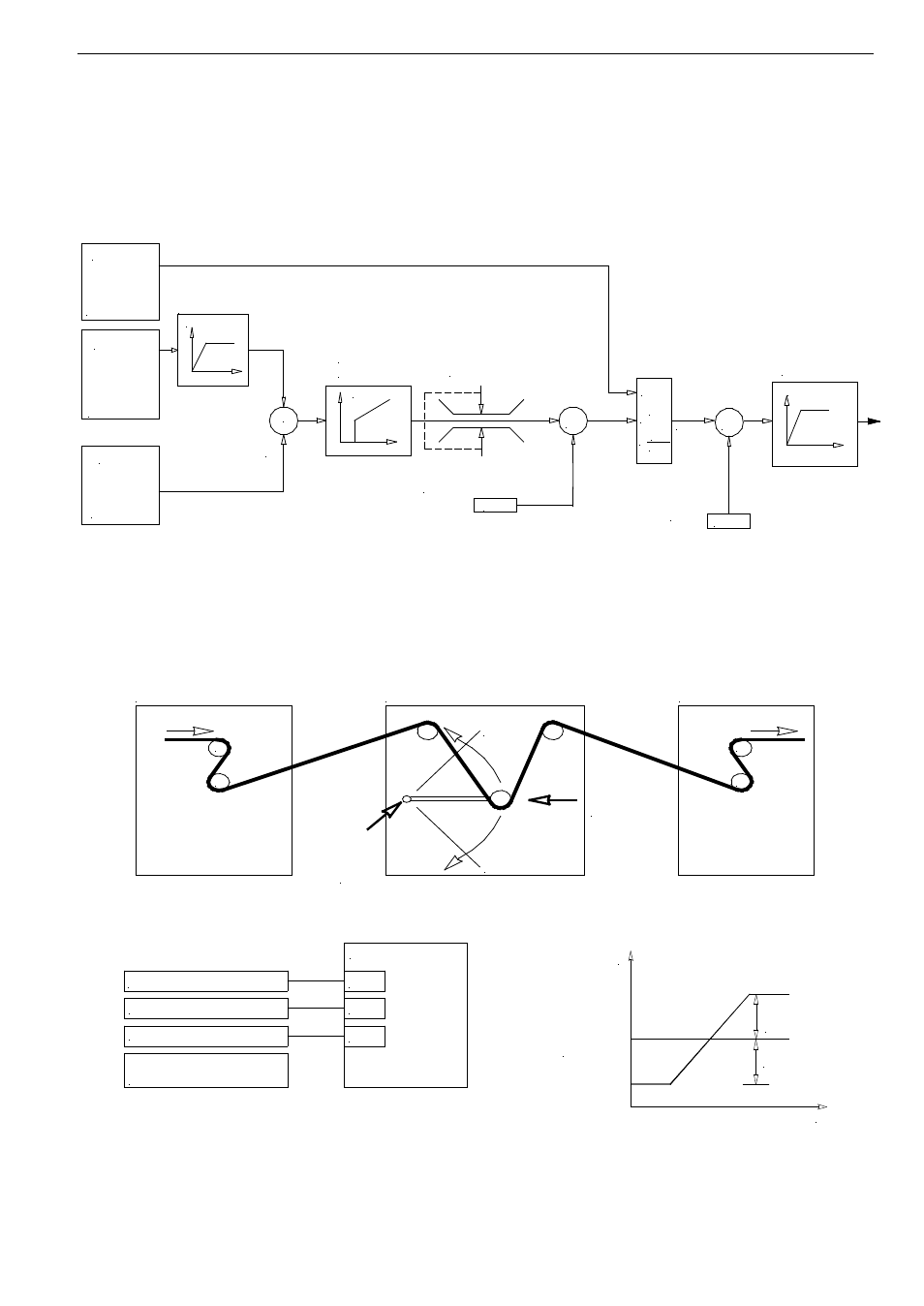
11.3 Регулятор процессов
Регулятор процессов это регулятор PI, с помощью которого возможно ограничить выход регулятора.
Дополнительно задается процентная норма для выхода по управляющей номинальной величине. Таким
образом, появляется возможность управлять имеющимся дополнительно подключенным приводом с
управляющей частотой.
+
-
Sollwert
Istwert
+
X
Leitsollwert
P-Faktor P413
I-Faktor P414
Sollwertrampe
Rampe PID-Regler
P416
Begrenzung P415
x1
x2
y
x1*x2
100 %
y=
Sollwertrampe
Hochlaufzeit P102
a) Analoger Eingang
(P400 = 1)
b) Analoge Fkt. für
dig. Eing. (= 28)
PI-Regler
100 %
a) Analoge Fkt. für
dig. Eing. (= 41)
b) Analoger Eingang
(P400 = 15)
c) P412 (0,0 - 10,0V)
a) Analoge Fkt. für
dig. Eing. (= 40)
b) Analoger Eingang
(P400 = 14)
interner Wert für Berechnung
0-100 %
Analoge Fkt.
für dig. Eingang
Fkt. 42
+
11.3.1 Пример применения регулятора процессов
Istposition PW
über Poti
0 - 10V
Leitmaschine
Geregelter Antrieb über PW
Pendelwalze = PW (Tänzerwalze)
M
M
M
M
0V
10V
Mitte 5V
Sollpostion
Dig.1
Sollposition PW
über Parameter P412
Sollwert von Leitmaschine
Freigabe rechts
Istposition PW
AIN1
Dig.2
Frequenzumrichter
f
t
Reglergrenze P415
in % vom Sollwert
Reglergrenze P415
Sollwert von
Leitmaschine