Инструкция по эксплуатации Samson 3730-5_FOUNDATION Fieldbus Электропневматический позиционер
Страница 92
92 EB 8384-5 RU
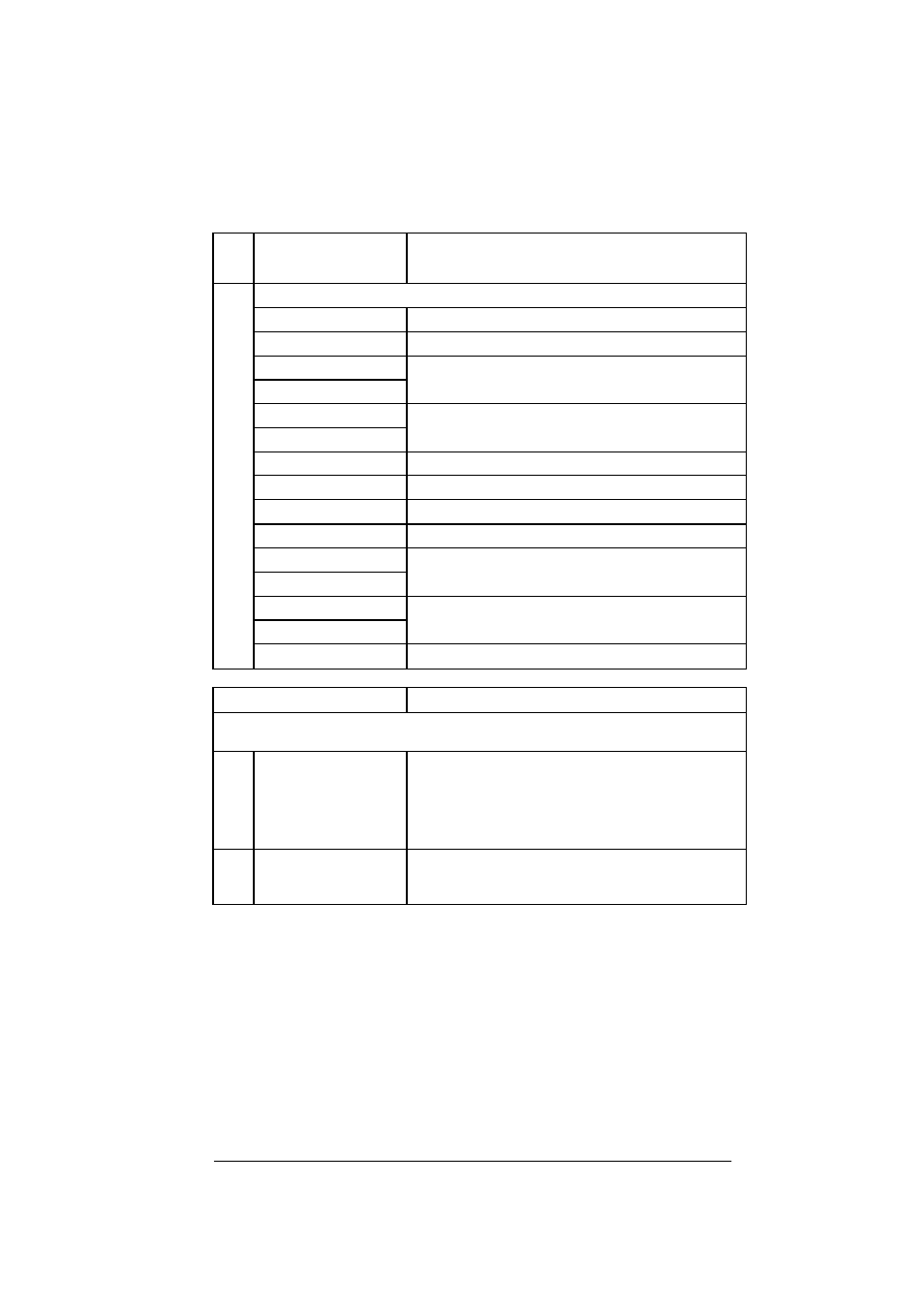
Номер
кода
Параметр - отображение,
значения [настройки по
умолчанию]
Описание
DI1 Рабочий блок I
I0 Целевой режим DI1
Требуемый рабочий режим
I1 Текущий режим DI1Actual
Текущий рабочий режим
I2 Значение Field_Val_D.
I3 Статус Field_Val_D.
Указывает переменную дискретного входа
и её статус
I4 Значение OUT_D.
I5 Статус OUT_D.
Указывает переменную дискретного
выхода и её статус
I6 Ошибка блока
Указывает текущую ошибку блока
D2 Рабочий блок L
L0 Целевой режим DI2
Требуемый рабочий режим
L1 Текущий режим DI2
Текущий рабочий режим
L2 Значение Field_Val_D.
L3 Статус Field_Val_D.
Указывает переменную дискретного входа
и её статус
L4 Значение OUT_D.
L5 Статус OUT_D.
Указывает переменную дискретного
выхода и её статус
L6 Ошибка блока
Указывает текущую ошибку блока
Коды ошибок – Устранение
неисправностей
Сигнал краткого статуса активен, когда рекомендовано,
появляется символ Err.
Ошибка инициализации (указана на дисплее кратким статусом и соответствующей
классификацией)
50
x < диапазона
Измерительный сигнал представляет слишком большое или
слишком малое значение, т.е. измерительный датчик работает
вблизи своей механической границы.
неправильно установлен штифт.
при монтаже по NAMUR сдвинулся уголок или позиционер
располагается не по средине.
неправильно установлена плата поводка.
Устранение
проблемы
Проверить правильность монтажа и позицию штифта,
перевести режим работы из SAFE в MAN и заново выполнить
инициализацию прибора.