Ii.2 настройки систе мы – Инструкция по эксплуатации HEIDENHAIN ND 280 User Manual
Страница 48
48
II Ввод в эксплуатацию, технические параметры
II.2
Настройки
систе
мы
Компенсация линейной погрешности (не для угловых
датчиков)
Вы можете использовать компенсацию линейной погрешности
только в том случае, если сравнительные измерения показали
линейную погрешность по всей измеряемой длине. Эту
погрешность ND 280 может компенсировать числовым значением
с помощью LEC correction factor.
Для расчета коэффициента компенсации линейной погрешности
используйте следующую формулу:
Пример:
Если длина, измеренная с помощью эталонного датчика,
составляет 500 мм, а линейный датчик оси X измерил 499,95 мм,
то коэффицент для оси X получается равным 100 ppm:
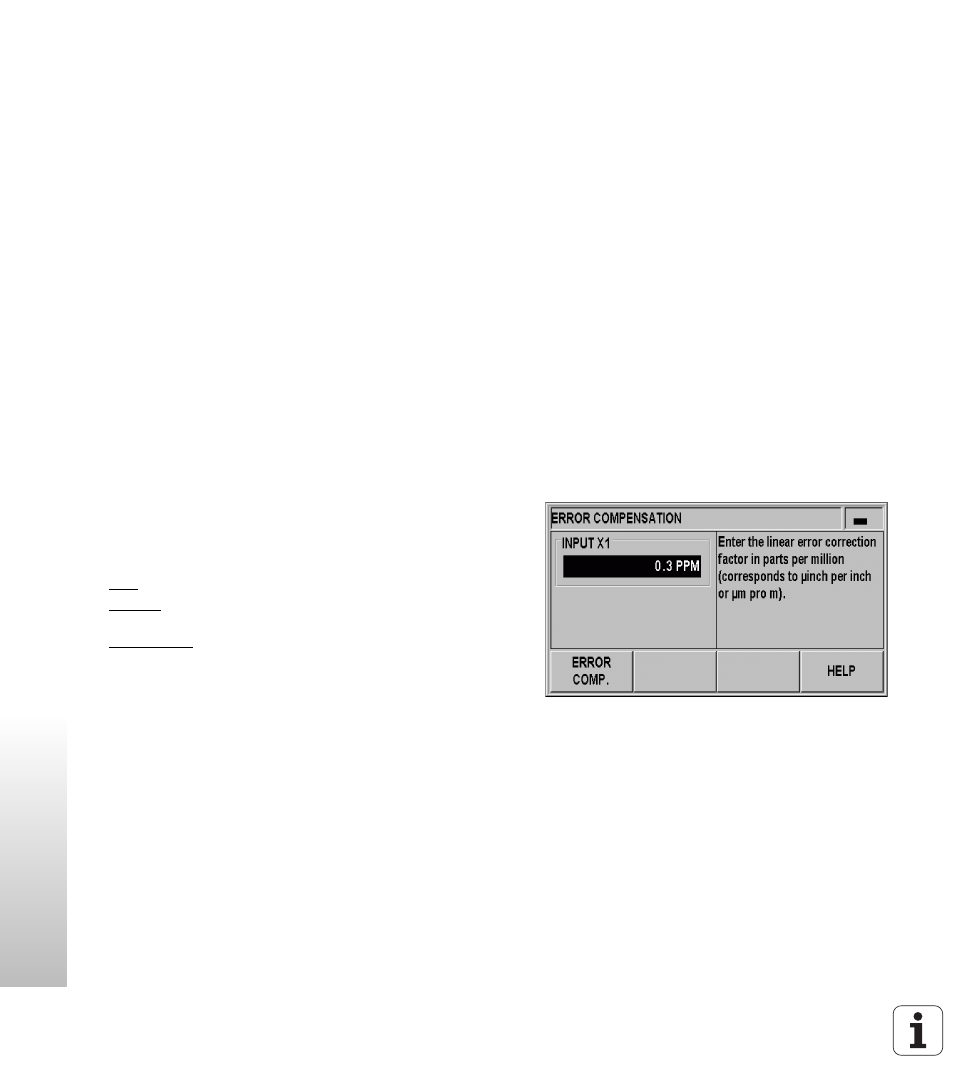
Задание компенсации линейной погрешности:
U
В меню INSTALLATION SETUP выберите ERROR
COMPENSATION
U
С помощью Softkey ERROR COMP. введите коэффициент
компенсации:
OFF означает отсутствие компенсации
0.0 ppm: с помощью клавиатуры введите измеренный
коэффициент компенсации линейной погрешности в ppm
NONLINEAR (смотри „Компенсация нелинейной погрешности”
U
Подтвердите ввод данных с помощью кнопки ENTER.
S:
Измеренная сравнительным прибором длина
M:
Измеренная линейным датчиком на оси длина
ppm:
parts per million (англ.) долей миллиона
1 ppm = 10
-6
= 1 мкм/м = 1 мкдюйм/дюйм
LEC
S
M
–
M
------------------
⎝
⎠
⎛
⎞
10
6
×
ppm
=
LEC
500
499 95
,
(
)
–
499 95
,
------------------------------------------------
⎝
⎠
⎛
⎞
10
6
×
ppm
100ppm
=
=
рис. II.21 Форма ввода компенсации линейной
погрешности