Кинематика инструментального суппорта, 2 параме тры инстр умента – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (606 42x-01) ISO programming
Страница 172
172
Программирование: инструменты
5.2
Параме
тры
инстр
умента
Кинематика инструментального суппорта
В таблице инструментов TOOL.T при необходимости каждому
инструменту можно назначить дополнительную кинематику
инструментального суппорта инструмента в столбце
KINEMATIC. В простейшем случае кинематика суппорта может
использоваться для моделирования хвостовика инструмента,
чтобы с его помощью вести учет данных в системе динамического
контроля столкновений. Кроме того, с помощью этой функции
можно наиболее простым образом интегрировать угловые
головки в общую кинематику станка.
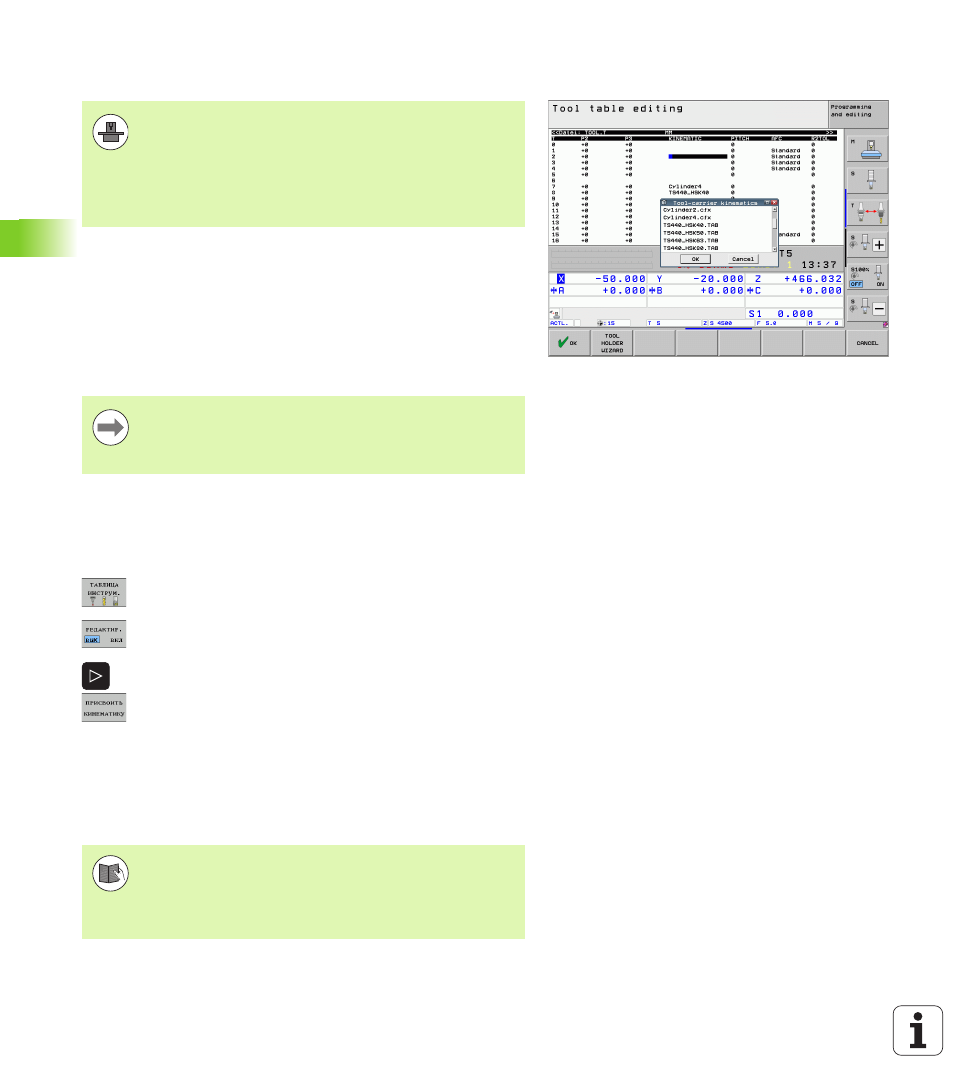
Присвоение кинематики суппорта
Чтобы присвоить инструменту кинематику суппорта выполните
следующие действия:
U
Выберите любой режим работы станка
U
Выбор таблицы инструментов: нажмите Softkey
ТАБЛИЦА ИНСТРУМЕНТОВ
U
Установите клавишу Softkey РЕДАКТИРОВАНИЕ
на “ВКЛ.”.
U
Выберите последнюю закладку клавиш Softkey
U
Отображение списка доступных кинематик:
система ЧПУ отображает все кинематики
суппорта (.TAB-файлы) и все настроенные вами
кинематики инструментального суппорта (.CFX-
файлы)
U
Выберите нужный вариант кинематики при
помощи клавиш со стрелками и введите его
клавишей Softkey OK
Для расчета кинематики инструментального суппорта
система ЧПУ должна быть адаптирована
производителем станков. Также производитель станка
должен предоставить в ваше распоряжение
кинематику суппорта или параметризированный
инструментальный суппорт. Соблюдайте указания
инструкции по обслуживанию станка!
HEIDENHAIN предоставляет кинематику
инструментального суппорта для измерительных
щупов производства HEIDENHAIN. При необходимости
обратитесь в компанию HEIDENHAIN.
Обращайте внимание на замечания по управлению
инструментальными суппортами в сочетании с
динамическим контролем сталкновений DCM: Смотри