6 трехмерная коррекция инструмента (по-опция 2), Введение – Инструкция по эксплуатации HEIDENHAIN iTNC 530 (606 42x-01)
Страница 494
494
Программирование: многоосевая обработка
12.6
Тр
ех
м
е
р
н
а
я
к
оррекция
инстр
умента
(
ПО
-опция
2)
12.6 Трехмерная коррекция
инструмента (ПО-опция 2)
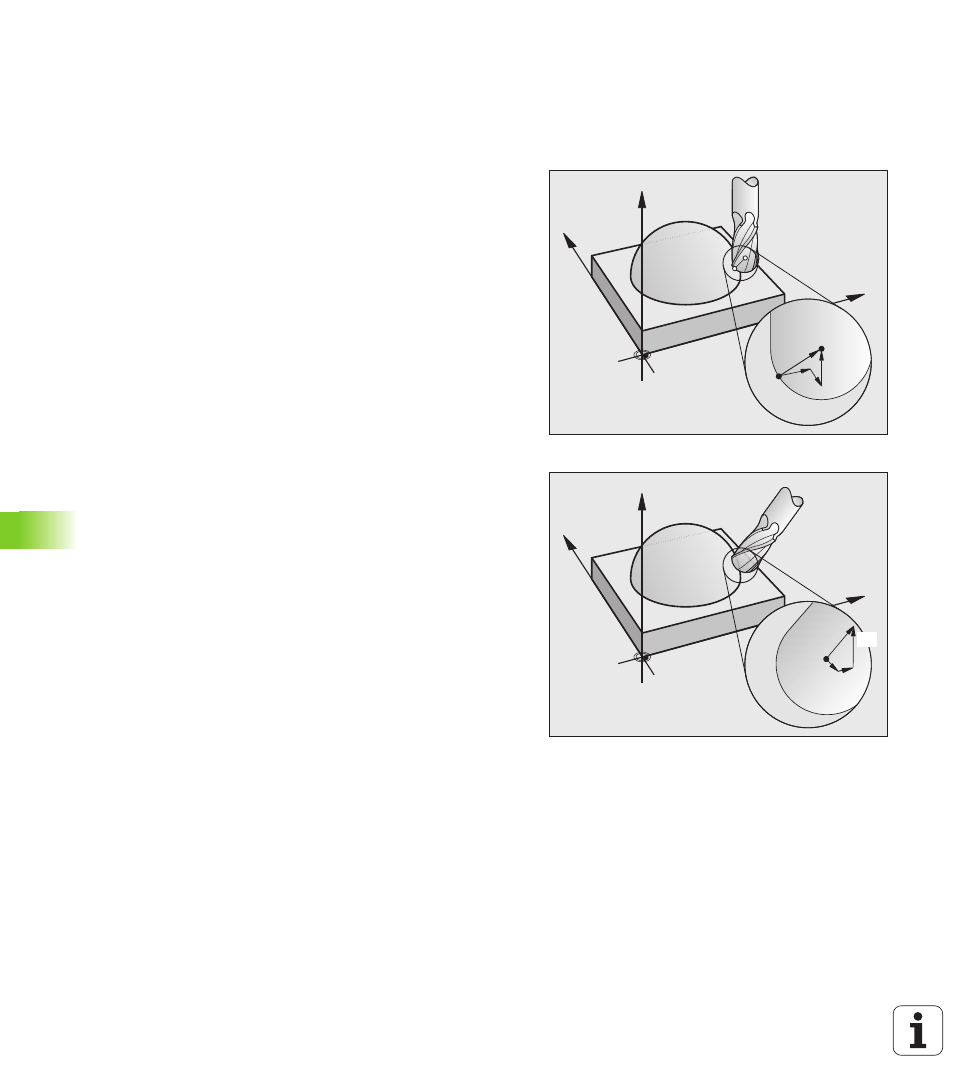
Введение
ЧПУ может выполнять трехмерную коррекцию инструмента (3D-
коррекцию) для кадров прямых. Наряду с координатами X,Y и Z
конечной точки прямой данные кадры должны также содержать
компоненты NX, NY и NZ вектора нормали к поверхности (смотри
„Определение нормированного вектора” на странице 495).
Если оператор намерен дополнительно произвести ориентацию
инструмента или трехмерную поправку на радиус, то эти кадры
также должны содержать нормированный вектор с компонентами
TX, TY и TZ, определяющий ориентацию инструмента (смотри
„Определение нормированного вектора” на странице 495).
Конечную точку прямой, компоненты нормали к поверхности и
компоненты для ориентации инструмента надо рассчитывать,
используя CAM-систему.
Варианты применения
Использование инструментов, размеры которых не совпадают с
размерами, рассчитанными CAM-системой (трехмерная
коррекция без определения ориентации инструмента)
Face Milling: коррекция геометрии фрезы в направлении
нормали к поверхности (трехмерная коррекция с определением
ориентации инструмента и без нее). Металлорезание
осуществляется в основном с помощью торцевой стороны
инструмента
Peripheral Milling: поправка на радиус фрезы перпендикулярно
направлению движения и перпендикулярно направлению
инструмента (трехмерная коррекция радиуса с определением
ориентации инструмента). Металлорезание осуществляется в
основном с помощью боковой поверхности инструмента
Z
Y
X
P
T
NZ
P
NX
NY
Z
Y
X
TX
TY
TZ