Инструкция по эксплуатации Partner P145107 PARO2010
Страница 49
49
02828
02828
02828
Система присутствия оператора и система
обратного хода (ROS)
Убедитесь, что системы присутствия оператора и
обратного хода работают надлежащим образом. Если
Ваш трактор не работает, как описано выше, немедленно
устраните неполадку.
•
Двигатель не следует запускать до тех пор, пока
педаль тормоза не будет полностью нажата, а рычаг
сцепления приспособления не будет перемещен в
выключенное положение.
ПРОВЕРЬТЕ СИСТЕМУ ПРИСУТСТВИЯ ОПЕРАТОРА:
•
При работающем двигателе, если оператор попытается
покинуть сиденье, не включив сначала стояночный
тормоз, двигатель будет выключен.
•
При работающем двигателе и включенном сцеплении
приспособления, если оператор попытается покинуть
сиденье, двигатель будет выключен.
•
Сцепление приспособления никогда не будет работать
до тех пор, пока оператор не займет свое место на
сиденьи.
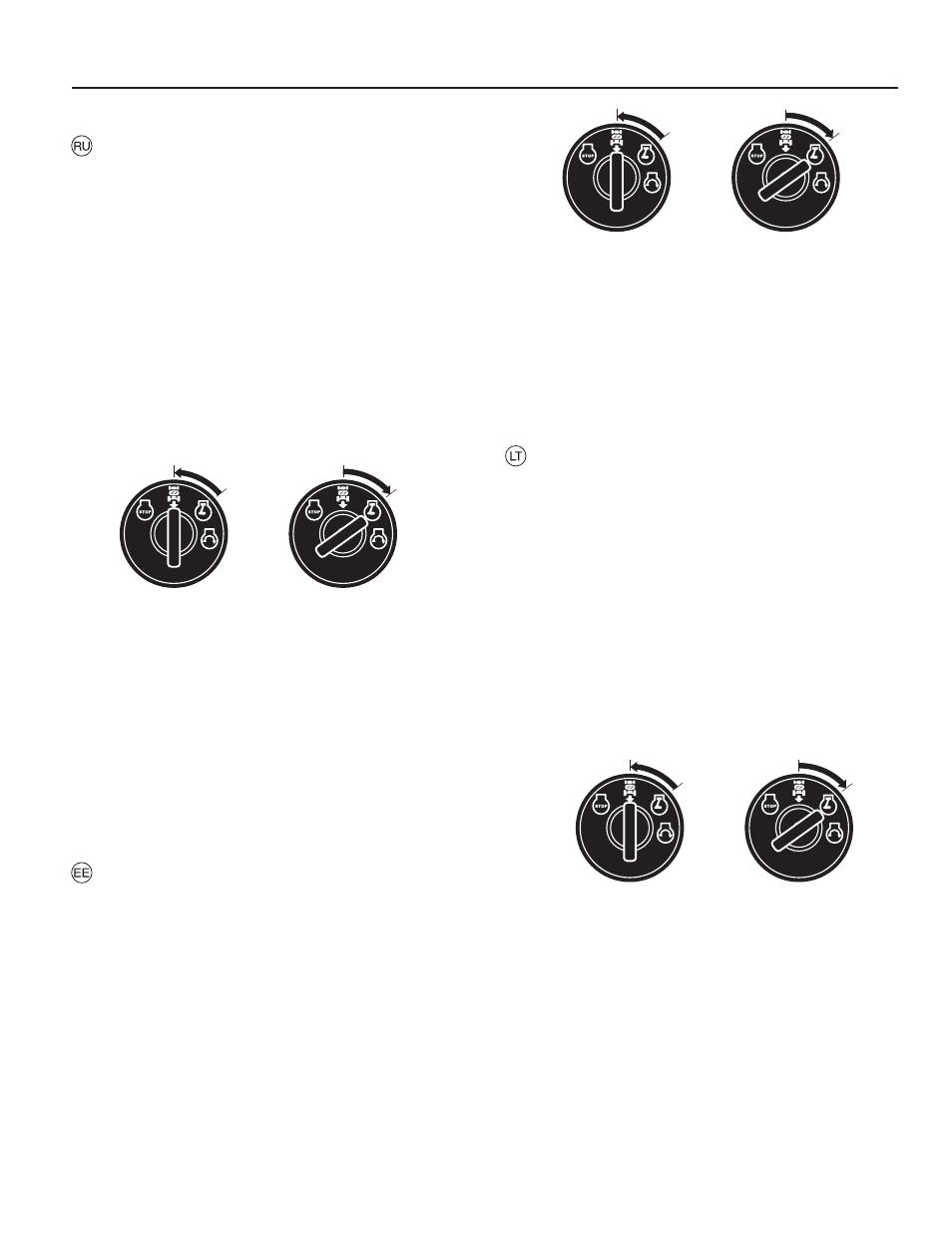
ПРОВЕРЬТЕ СИСТЕМУ УПРАВЛЕНИЯ ЗАДНИМ ХОДОМ
(ROS):
•
Если двигатель работает в то время, когда выключатель
зажигания находится в положении двигателя “ON”,
а сцепление приспособления включено, любая
попытка оператора включить задний ход приведет к
выключению двигателя.
•
Если двигатель работает в то время, когда выключатель
зажигания находится в положении системы ROS
“ON”, а сцепление приспособления включено, любая
попытка оператора включить задний ход приведет к
выключению двигателя.
Juhi kohaloleku kontrollsüsteem ja reevers-op-
eratioonisüsteem (ROS)
Veenduge, et juhi kohaloleku kontrolli ja reevers-operatsioon-
isüsteemid töötavad korralikult. Kui teie traktor ei funktsioneeri
kirjeldatud moel, lahendage see probleem koheselt.
•
Mootor ei tohiks käivituda, kui piduripedaal pole täielikult
alla vajutatud ning lisaseadme sidur rakendamata asen-
dis.
JUHI KOHALOLEKU KONTROLLSÜSTEEMI KONTROLL:
• Kui mootor töötab, põhjustab juhi lahkumiskatse juhi-
istmelt, eelnevalt seisupidurit rakendamata, mootori
seiskumise.
• Kui mootor töötab ja lisaseadme sidur on rakendatud,
peaks juhi lahkumiskatse juhiistmelt põhjustama mootori
seiskumise.
•
Lisaseadme sidur ei tohiks kunagi töötada, kui juhti juhi-
istmel pole.
REEVERS-OPERATSIOONISÜSTEEMI (ROS) KON-
TROLL:
•
Kui mootor töötab, süütelüliti on asendis Engine “ON” ning
lisaseadme sidur rakendatud, peaks juhi katse lülitada
sisse tagurpidikäik mootori seiskama.
•
Kui mootor töötab, süütelüliti on asendis ROS “ON” ning
lisaseadme sidur rakendatud, EI peaks juhi katse lülitada
sisse tagurpidikäik mootorit seiskama.
Operatoriaus buvimo darbo vietoje sistema ir
veikimo atbuline eiga sistema (ROS)
Įsitikinkite, kad operatoriaus buvimo darbo vietoje ir veikimo
atbuline eiga sistemos veikia tinkamai. Jei traktorius veikia
ne taip, kaip aprašyta, tuojau pat sutvarkykite gedimą.
•
Variklis neturėtų užsivesti esant visiškai nenuspaustam
stabdžių pedalui ir padargo sankabos valdikliui nesant
išjungtoje padėtyje.
PATIKRINKITE OPERATORIAUS BUVIMO DARBO VIETOJE
SISTEMĄ:
•
Veikiant varikliui, bet koks operatoriaus bandymas palikti
sėdynę neįjungus stovėjimo stabdžio, turėtų užgesinti
variklį.
• Veikiant varikliui ir esant įjungtai padargo sankabai,
bet koks operatoriaus bandymas palikti sėdynę turėtų
užgesinti variklį.
•
Padargo sankaba turėtų neveikti, jei operatorius nesėdi
sėdynėje.
PATIKRINKITE VEIKIMO ATBULINE EIGA SISTEMĄ
(ROS):
• Veikiant varikliui, užvedimo rakteliui esant veikiančio
variklio padėtyje ir esant įjungtai padargo sankabai,
bet koks operatoriaus bandymas įjungti atbulinės eigos
pavarą turėtų užgesinti variklį.
•
Veikiant varikliui, užvedimo rakteliui esant įjungtos ROS
padėtyje ir esant įjungtai padargo sankabai, bet koks
operatoriaus bandymas įjungti atbulinės eigos pavarą
turėtų NEUŽGESINTI variklio.
6