Инструкция по эксплуатации Partner P11577HRB 2010
Страница 43
43
Система управления задним ходом (ROS)
Ваш трактор оборудован системой управления задним
ходом (ROS). При любой попытке оператора выполнить
задний ход при включенном сцеплении приспособления
двигатель будет выключаться до тех пор, пока ключ
зажигания не будет повернут в положение системы ROS
“ON”.
ВНИМАНИЕ! Задний ход при включенном сцеплении
приспособления во время косьбы строго крайне не
желателен. Поворот ключа зажигания в положение системы
ROS “ON” для выполнения заднего хода при включенном
сцеплении приспособления следует выполнять только
тогда, когда оператор решит, что необходимо переставить
машину вместе с присоединенным приспособлением. Не
выполняйте косьбу при движении назад, если в этом нет
крайней необходимости.
ИСПОЛЬЗОВАНИЕ СИСТЕМЫ ROS
• Передвиньте рычаг управления движением в
нейтральное положение (N).
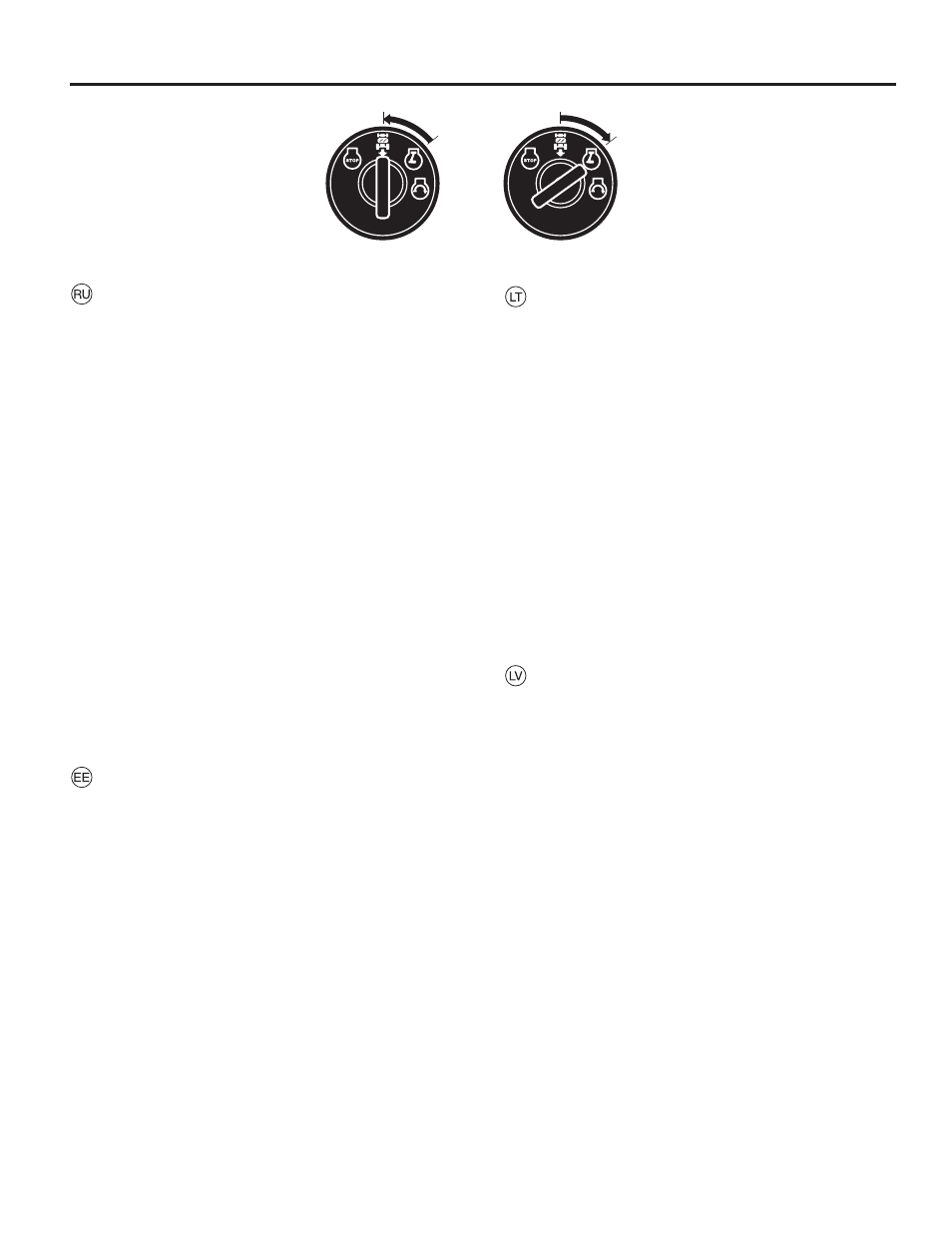
• При работающем двигателе поверните ключ
зажигания против часовой стрелки в положение
системы ROS “ON”.
• Прежде чем начать задний ход, посмотрите вниз и
назад.
• Медленно
переместите
рычаг
управления
движением в положение заднего хода (R) для начала
движения.
• Если использование системы ROS больше не
требуется, поверните ключ зажигания в положение
двигателя “ON”.
Reevers-operatsioonisüsteem (ROS)
Teie traktor on varustatud reevers-operatsioonisüsteemiga
(ROS). Juhi katse tagurdada, kui lisaseadme sidur on
rakendatud, lülitab mootori välja, väljaarvatud juhul, kui
süütevõti on asendis ROS “ON”.
HOIATUS! Rakendatud lisaseadme siduriga tagurdamine
niitmise käigus on äärmiselt mittesoovitatav. ROS-i
sisselülitamine (“ON”), et võimaldada reevers-operatsiooni
rakendatud lisaseadme siduriga, peaks toimuma ainult juhul,
kui juht peab vajalikuks rakendatud lisasedamega masinat
ümber paigutada. Ärge niitke tagurdamise käigus ilma
äärmise vajaduseta.
ROS-i KASUTAMINE
• Viige sõidukang neutraalasendisse (N).
• Mootori töötades keerake süütevõtit vastupäeva
asendisse ROS “ON”.
• Enne tagurdamist vaadake alla ja taha.
• Viige liikuma hakkamiseks sõidukang aeglaselt
tagurpidikäigu (R) asendisse.
• Kui tarvidust ROS-i kasutada enam pole, keerake
süütevõtit päripäeva asendisse Engine “ON”.
Veikimo atbuline eiga sistema (ROS)
Traktoriuje įrengta veikimo atbuline eiga sistema (ROS).
Bet koks operatoriaus bandymas judėti atbuline eiga esant
įjungtai padargo sankabai, užgesins variklį, jei tik užvedimo
raktelis nebus perjungtas į įjungtos ROS padėtį.
PERSPĖJIMAS! Rekomenduojama šienaujant nevažiuoti
atbuline eiga esant įjungtai padargo sankabai. ROS įjungimas,
leidžiantis važiuoti atbuline eiga esant įjungtai padargo
sankabai, turėtų būti naudojamas tik tuomet, kai operatorius
nusprendžia, kad būtina pakeisti mašinos buvimo vietą esant
įjungtam padargui. Nešienaukite atbuline eiga, jei tai nėra
absoliučiai būtina.
ROS NAUDOJIMAS
• Perjunkite judėjimo valdymo svirtį į neutralią (N) padėtį.
• Veikiant varikliui, pasukite užvedimo raktelį prieš
laikrodžio rodyklę į ROS įjungimo padėtį.
• Prieš važiuodami atbuline eiga apsižiūrėkite, kas yra už
ir po agregatu.
• Lėtai perjunkite judėjimo valdymo svirtį į atbulinės eigos
(R) padėtį, kad pradėtumėte judėti.
• Kai ROS nebereikalinga, pasukite užvedimo raktelį
pagal laikrodžio rodyklę į veikiančio variklio padėtį.
Reversa Operâcijas Sistçma (ROS)
Jűsu traktors ir aprîkots ar reversa operâcijas sistçmu (ROS).
Ja aizdedzes atslçga nav novietota stâvoklî ROS, mçěinâjums
pârvietoties atpakaďgaitâ ar ieslçgtu nomainâmâ aprîkojuma
sajűgu izslçgs dzinçju.
BRÎDINÂJUMS! Pďauđanas laikâ pârvietođanâs atpakaďgaitâ
ar ieslçgtu nomainâmâ aprîkojuma sajűgu ir kategoriski
nevçlama. ROS ieslçgt, lai dotu iespçju pârvietoties
atpakaďgaitâ ar ieslçgtu nomainâmâ aprîkojuma sajűgu,
var tikai tad, ja operators uzskata par nepiecieđamu mainît
mađînas stâvokli ar ieslçgtu nomainâmâ aprîkojuma
sajűgu. Nepďaujiet atpakaďgaitâ, ja vien tas nav absolűti
nepiecieđams.
ROS LIETOŠANA
• Pârvietojiet kustîbas vadîbas sviru neitrâlâ stâvoklî (N).
• Dzinçjam darbojoties, pagrieziet aizdedzes atslçgu pret
pulksteňrâdîtâja kustîbas virzienu uz stâvokli ROS.
• Paskatieties zem mađînas un uz aizmuguri, pirms sâkat
kustîbu atpakaďgaitâ.
• Lçni pârvietojiet kustîbas vadîbas sviru reversa (R)
stâvoklî, lai uzsâktu kustîbu atpakaďgaitâ.
• Kad ROS vairs nav nepiecieđams, pagrieziet aizdedzes
atslçgu pulksteňrâdîtâja kustîbas virzienâ uz stâvokli
“dzinçjs ieslçgts”.
02828
Положение системы ROS “ON”
ROS “ON”
ROS įjungta
ROS ieslçgts
ROS “ВКЛЮЧЕНО”
ROS “ON”
Положение двигателя “ON”
(обычная работа)
Engine “ON” (normaalne töötamine)
Veikiantis variklis (normalus veikimas)
Dzinçjs ieslçgts (Normâlais darba stâvoklis)
Двигател “ВКЛЮЧЕН” (нормално
работещ)
Motor “ON” (Functionare normala)
5