Инструкция по эксплуатации Samson 3730-4 Электропневматический позиционер
Страница 7
EB 8384-4 RU
7
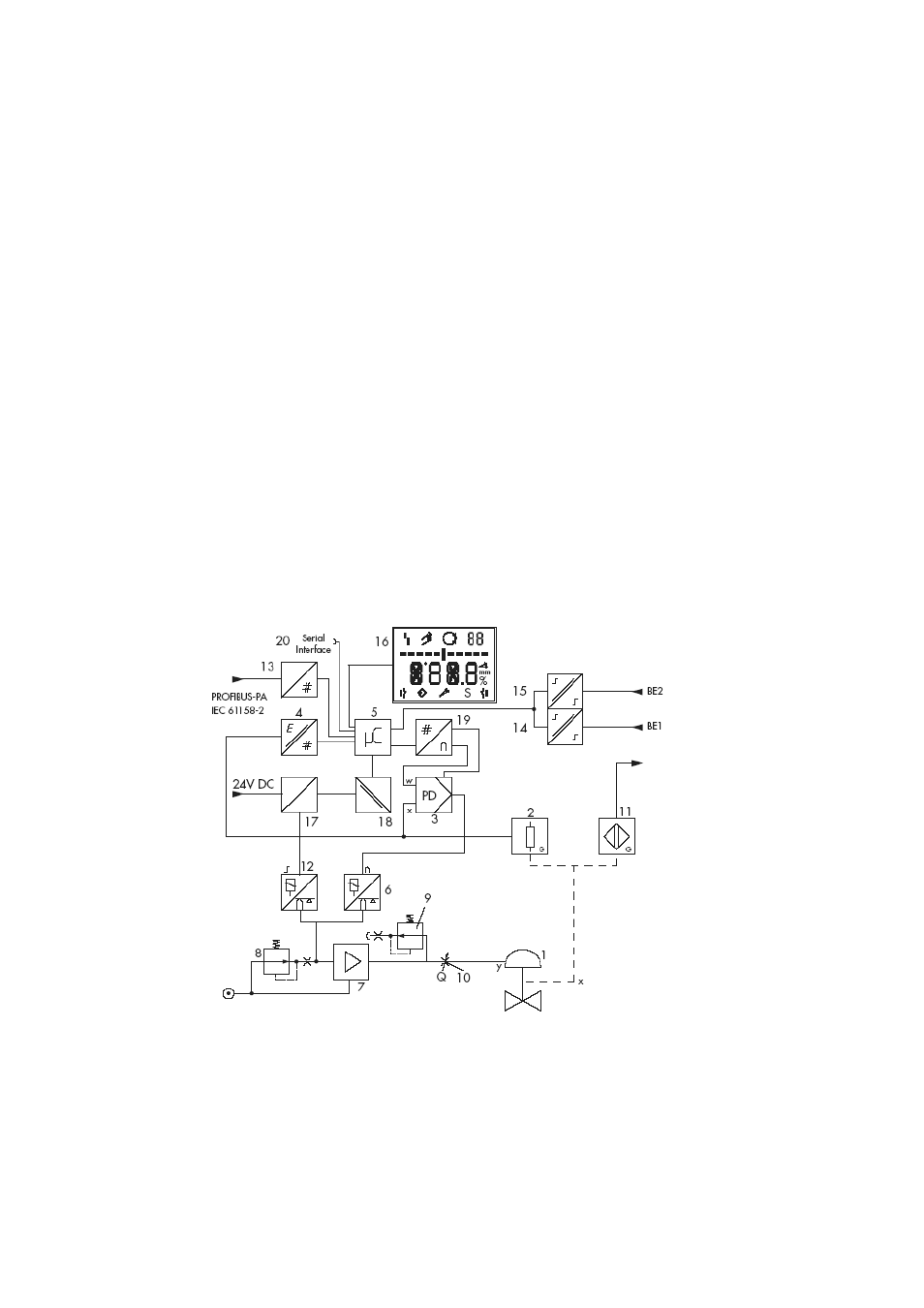
1 Конструкция и принцип
действия
Электропневматический позиционер
устанавливается на пневматические
регулирующие клапаны и предназначен
для «привязки» положения клапана
(регулируемый параметр x) к величине
управляющего сигнала (задающего
параметра w). Для этого управляющий
электрический сигнал, поступающий от
какого-либо регулирующего устройства,
сравнивается с величиной
хода/поворота регулирующего клапана,
на основе чего вырабатывается
необходимое управляющее давление
(выходной сигнал y).
Позиционер включает в себя: систему
определения хода пропорционально
величине сопротивления, аналоговый i/p-
преобразователь с усилителем
мощности и электронную часть с
микроконтроллером.
При наличии рассогласования давление
на привод подается либо сбрасывается.
При необходимости разница
управляющего давления может быть
уменьшена с помощью дросселя
расхода Q. Управляющее давление на
приводе может быть ограничено
программно или на месте до 1.4, 2.4 или
3.7 бар.
Постоянный поток воздуха в атмосферу
создается регулятором потока (9) с
заданным значением. Поток воздуха
очищает корпус внутри, а также
оптимизирует объем пневмоусилителя.
Регулятор давления (8) обеспечивает
I/p-преобразователь (6) постоянным
притоком давления, что делает
последний независимым от питающего
давления воздуха.
1
Клапан
2
Датчик хода
3
PD контроллер
4
A/D преобразователь
5
Микроконтроллер
6
i/p преобразователь
7
Воздушный усилитель
8
Регулятор давления
9
Регулятор потока
10
Ограничитель объема
11
Индуктивн. конечн.выкл.
12*
Магнитный клапан
13
IEC 61158-2
интерфейсный модуль
14
Дискретный вход 1
(вход напряжения)
15
Дискретный вход 2 (для
плавающего контакта)
16
Дисплей
17
Управление магн. клап.
18
Гальванич. развязка
19
D/A преобразователь
20
Интерфейс (SSP)
*
По запросу