Инструкция по эксплуатации Festo Направляющие ELFR
Страница 3
10
Устранение неисправностей
Неисправность
Возможная причина
Способ устранения
Звуки, напомина-
ющие писк, виб-
рации или нерав-
номерное движе-
ние
Перекосы
Монтаж ELFR следует производить без
перекосов (следите за плоскостностью
опорной поверхности
Î глава «Ме-
ханический монтаж»)
Изменить скорость движения
Подшипник поврежден или
изношен
Отправить ELFR на ремонт
в фирму Festo
Каретка не дви-
жется
Слишком высокие на-
грузки
Уменьшить массу нагрузки
Направляющую заклинило
Уменьшить моменты
Каретка прохо-
дит конечное по-
ложение
Не срабатывает датчик
приближения
Проверить датчик приближения, под-
ключения и систему управления
Рис. 11
11
Технические данные
ELFR-...
35
45
55
Конструктивное исполне-
ние
Механическая пассивная направляющая
направляющей
–
Направляющая качения с шарикопод-
шипниками рециркуляционного типа
GF
Направляющая скольжения
Монтажное положение
Любое
Усилие перемещения
[Н]
3
6
10
Макс. скорость
–
[м/с]
3
GF
[м/с]
1
Макс. ускорение
[м/с
2
]
50
Макс. прогиб
[мм]
0,5
Температура окружаю-
щей среды
–
[°C]
–10 ... +50
GF
[°C]
0 ... +40
Класс защиты
IP20
Замечания по материалу
В состав входят вещества, содержащие
ЛАБС (линейные алкил-бензоловые суль-
фонаты)
Информация о материалах
– Крышка. каретка, профиль:
алюминий анодированный
– направляющая, шарикоподшипник,
винты, стопорные кольца, фиксатор
сталь
– Кожух
Полиамид/полистирол
Вес
– 0 мм ход
–
[кг]
1,2
2,67
4,55
GF
[кг]
1,1
2,52
4,19
– на метр хода
–
[кг]
2,41
4,93
7,7
GF
[кг]
2,31
4,92
7,7
Рис. 12
Допустимые нагрузки от усилий и мгновенные нагрузки
1)
ELFR-...
35
45
55
Fymax = Fzmax
–
[Н]
50
100
300
Mxmax
–
[Нм]
2,5
5
15
Mymax = Mzmax
–
[Нм]
8
16
48
Fymax = Fzmax
GF
[Н]
50
100
300
Mxmax
GF
[Нм]
1
2,5
5
Mymax = Mzmax
GF
[Нм]
4
8
16
Формула для комбинированных нагрузок:
f
v
=
Mx
Mx
max
+
My
My
max
+
Mz
Mz
max
+
Fy
Fy
max
+
Fz
Fz
max
1
Статический момент 2-й степени
Y
Z
– Iy
[мм
4
]
3 771
15 707
38 349
– Iz
[мм
4
]
188 574
807 546
1 853 601
1)
Со стандартной кареткой
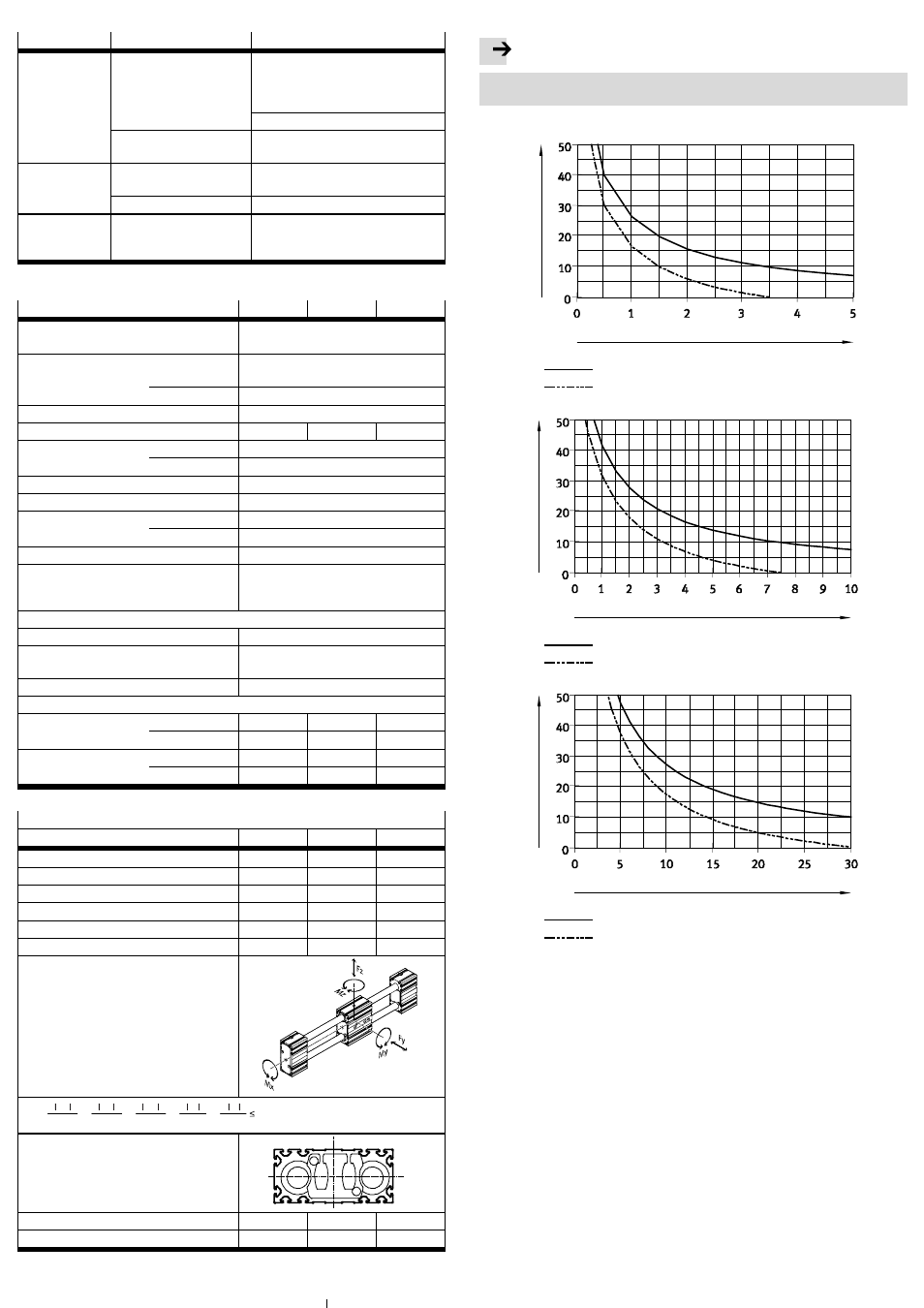
Рис. 13
Зависимость ускорения a от полезной нагрузки m
Примечание
Для направляющих скольжения (GF) рекомендуется снизить ускорение, чтобы свести к
минимуму перерегулирование и повысить точность позиционирования.
ELFR-...-35
горизонтально
вертикально
м [кг]
a[
м
/с
2]
ELFR-...-45
горизонтально
вертикально
м [кг]
a[
м
/с
2]
ELFR-...-55
горизонтально
вертикально
м [кг]
a[
м
/с
2]
Рис. 14