Инструкция по эксплуатации Standard Horizon CVP-550
Страница 62
Морской
GPS
картплоттер
с
УКВ
радиостанцией
STANDARD HORIZON
ООО
"
КОМПАС
-
Р
"
(495) 956-13-94
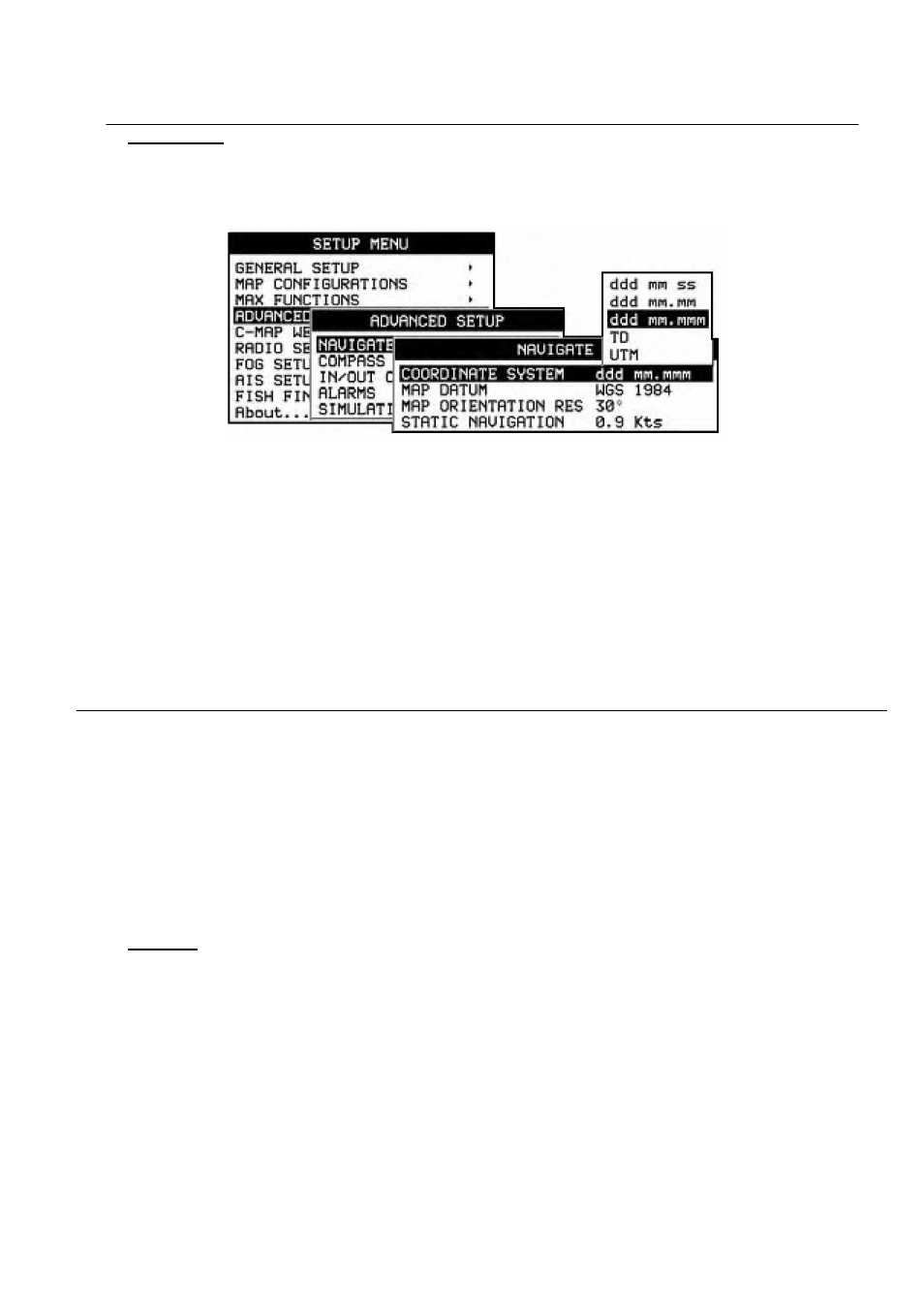
14.1.
НАВИГАЦИЯ
Меню
навигации
позволяет
настроить
Координатную
систему
, (LORAN TD),
Систему
картографии
,
Разре
-
шение
ориентации
карты
(
угол
,
на
который
должно
повернуться
судно
,
чтобы
произошла
перерисовка
кар
-
ты
)
и
Статическую
навигацию
.
Coordinate system
Система
коорди
-
нат
Возможный
выбор
:
c. TD: LORAN TD
d. UTM:
Универсальная
сетка
Меркатора
e. ddd mm.mmm:
Градусы
,
Минуты
,
тысячные
Минут
f.
ddd mm.mm:
Градусы
,
Минуты
,
сотые
Минут
g. ddd mm.ss:
Градусы
,
Минуты
,
Секунды
(
по
умолчанию
)
Map Datum
Картография
Выбор
картографической
системы
.
По
умолчанию
принято
WGS84,
т
.
к
.
картография
C-MAP
строилась
на
основе
WGS84
Map OriENTation resolu-
tion
Разрешение
Ори
-
ентации
Карты
Устанавливает
угол
,
на
который
должно
повернуться
судно
,
прежде
чем
карта
будет
перерисована
.
По
умолчанию
– 30
0
.
Например
:
Судно
движется
курсом
000T
на
ско
-
рости
25
узлов
.
Карта
будет
перерисована
:
a.
В
Домашнем
режиме
картплоттер
изображает
судно
в
центре
карты
,
поэто
-
му
при
движении
судна
Карта
будет
периодически
перерисована
.
b.
Если
изменение
курса
составит
более
330T
или
30T,
Карта
будет
перерисо
-
вана
.
Static Navigation
Статическая
Нави
-
гация
.
Устанавливает
порог
нулевой
скорости
.
Если
значение
скорости
менее
этого
порога
,
картплоттер
показывает
ноль
.
По
умолчанию
– 0,9
узлов
.
Выбор
LORAN TD
позволяет
пользователю
непосредственно
вводить
в
картплоттер
Задержки
(TD) LORAN.
После
ввода
Задержек
и
переключения
в
режим
"ddd mm.sss (
Градусы
,
Минуты
и
Секунды
),
Задержки
будут
конвертированы
в
координаты
.
Для
использования
Координатной
Системы
LORAN
необходимо
определить
информацию
о
Цепях
и
Парах
.
Если
эта
информация
Вам
неизвестна
,
обратитесь
к
бумажным
картам
,
на
которых
присутствует
информа
-
ция
о
Цепях
и
Парах
.
ASF ½
Дополнительный
вторичный
фактор
Дополнительный
вторичный
фактор
ошибки
фазы
(TD
координатная
система
)
Коррекция
половинных
значений
TD,
вводимая
пользователем
.
Alter
Альтернатива
Альтернативное
решение
.
Выбираемый
пользователем
параметр
применим
к
преоб
-
разованию
Временных
задержек
в
значения
широты
/
долготы
.
Определяет
,
какое
из
двух
доступных
решений
будет
использовано
.
14.2.
КОМПАС
GPS
картплоттер
вычисляет
направление
компаса
на
основании
информации
,
полученной
со
спутников
.
Для
вычисления
Курса
Относительно
Земли
(COG),
судно
должно
двигаться
.
Меню
позволяет
настроить
в
GPS
картплоттере
следующие
параметры
:
Bearings
Склонение
Выбор
между
Истинным
и
Магнитным
.
Если
выбрано
Магнитное
Склонение
, GPS
картплоттер
исполь
-
зует
выбранную
(
вручную
или
автоматически
–
см
.
след
.
Параграф
)
Поправку
для
вычисления
истин
-
ного
склонения
..
Variation
Поправка
Позволяет
выбирать
между
Автоматическим
и
Ручным
(Auto
или
Manual).
При
выборе
режима
АВТО
,
GPS
картплоттер
вычисляет
поправку
на
основании
спутниковых
данных
.
РУЧНОЙ
режим
позволяет
пользователю
вводить
склонение
,
которое
затем
используется
для
вычисления
истинного
азимута
.
Calibration
Калибровка
Эта
функция
позволяет
ввести
поправки
сразу
для
всех
зон
,
в
которых
может
находиться
Ваше
Судно
,
вместо
того
,
чтобы
вводить
поправку
каждый
раз
отдельно
.
Эта
поправка
удобна
для
круизных
судов
и
для
судов
,
часто
совершающих
интернациональные
плавания
.
Рис
. 14.1. -
Меню
"
Навигация
"