Инструкция по эксплуатации Samson 3787_FOUNDATION Fieldbus Цифровой позиционер
Страница 62
62
Описание параметров
EB 8383-1 RU
Влияние интегрирующей части на процесс регулирования возрастает, когда
величина времени интегрирования RESET увеличивается.
¾
Дифференцирующая часть.
В условиях регулирования с большой инерционностью процесса, например, при
регулировании температуры, имеет смысл использовать дифференцирующую
часть регулятора. Посредством дифференцирующей части с параметром RATE
производится расчет управляющего сигнала в зависимости от изменения
рассогласования.
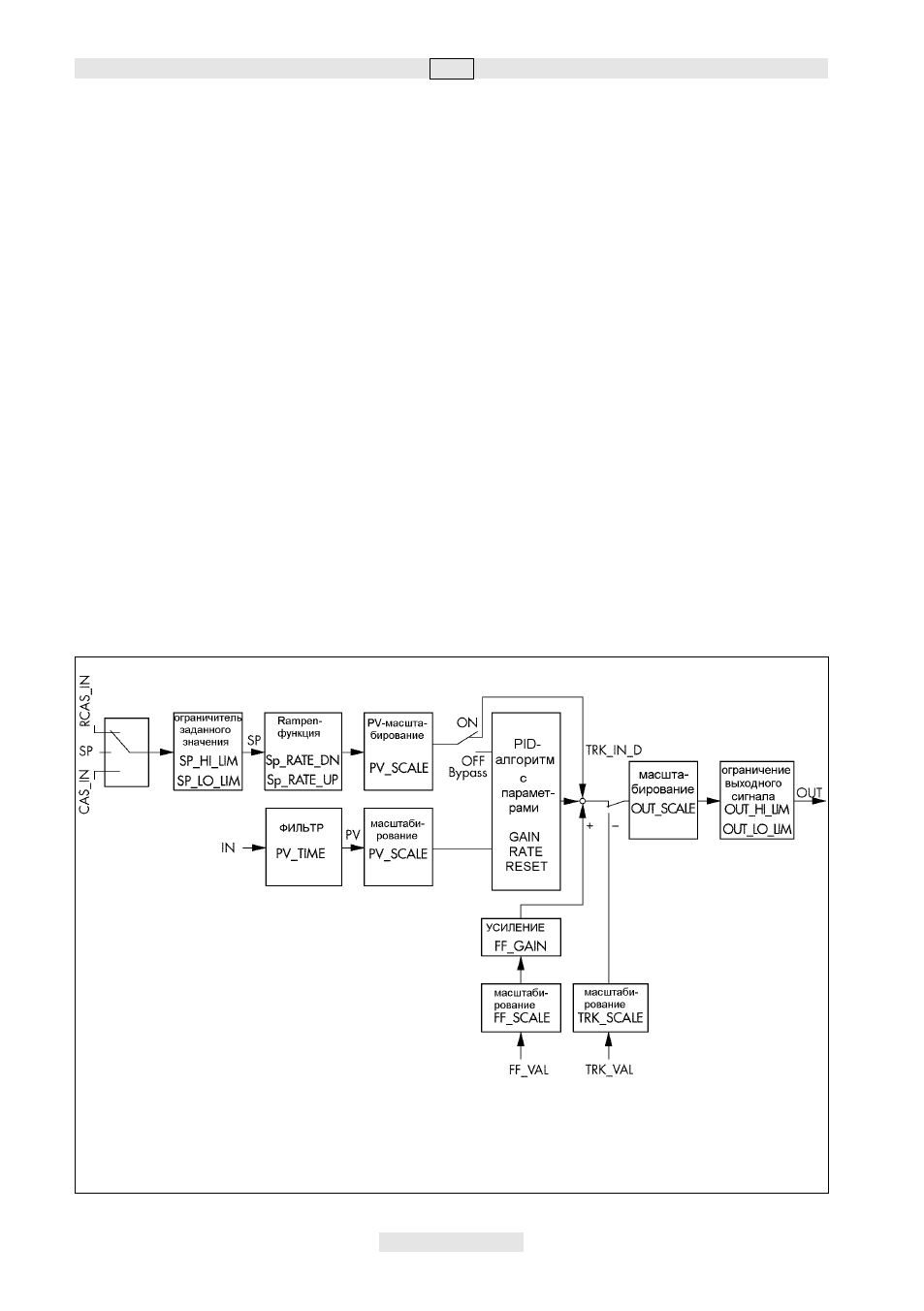
Согласно параметрам OUT_SCALE, OUT_HI_LIM и OUT_LO_LIM из управляющего
сигнала выделяется выходное значение OUT, которое поступает на следующий
функциональный блок.
Через параметр STATUS_OPTS можно в зависимости от статуса входных сигналов
PID-блока влиять на статус выходного значения OUT. Посредством этого, например,
можно активировать защитное реагирование включенного после PID-блока
выходного блока.
Параметр BYPASS позволяет осуществлять прямую подачу внутреннего задающего
сигнала вместо управляющего сигнала.
Через входную переменную FF_VAL возможна подача возмущающего воздействия,
а TRK_IN_D и TRK_VAL прямое управление выходным сигналом.
возмущающее система
воздействие слежения
Рис.15 • Функциональный PID-блок (PID-регулятор)