Инструкция по эксплуатации Samson 3731-5 Ex d Электропневматический позиционер
Страница 13
Конфигурация и управление через FOUNDATION™ fieldbus
Если значение времени интегрирования RESET установлено на ноль, регулятор работает как
П- или ПД- регулятор. При уменьшении значения времени интегрирования, влияние
интегральной составляющей на контур регулирования увеличивается.
Дифференциальная составляющая:
В регулируемых системах с большим временем запаздывания, например, контур
регулирования температуры, лучше использовать дифференциальную составляющую
регулятора RATE. Управляющее воздействие вычисляется в зависимости от диапазона
изменения рассогласования в системе, используя дифференциальную составляющую
RATE.
Выходное значение OUT формируется из вычисленного управляющего воздействия в
соответствии с параметрами OUT_SCALE, OUT_HI_LIM или OUT_LO_LIM. Это
выходное значение может передаваться на нижеследующий подключенный
функциональный блок.
Статус выходного значения OUT может быть под воздействием параметра STATUS_OPTS,
в зависимости от статуса входной переменной ПИД- функционального блока. Это позволяет,
например, активировать состояние отказа нижеследующего подключенного выходного
блока.
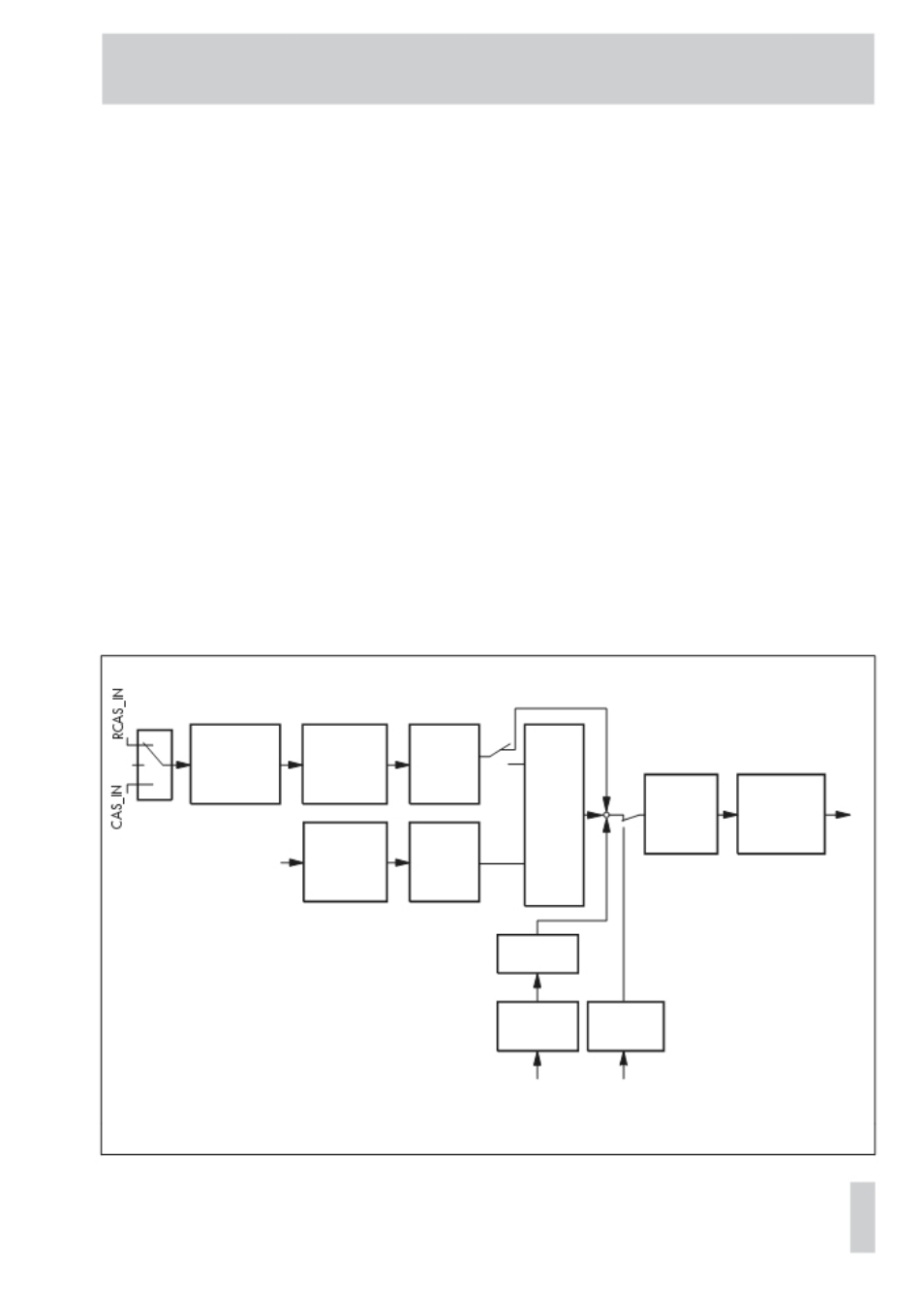
Параметр BYPASS позволяет передать внутреннее заданное значение напрямую величине
коррекции. Упреждающее воздействие возможно через вход переменной FF_VAL.
TRK_IN_D и TRK_VAL позволяют напрямую передать выходное значение.
Список параметров см. на стр. 66.
Ограничение
пилообразное
зад-го значения SP зад. значение
SP
SP
_
HI_LIMSP_ Sp_RATE_DN
LO
_
LIM Sp_RATE_UP
Фильтр
IN PV_TIME
Рис. 6 · ПИД- функциональный блок
ON
Алгоритм
ПИД TRK_IN_D
PV_SCALE OFF
Bypass
Ограничение
GAIN
выхода OUT
RATE +
-
OUT_SCALE
OUT_HI_LIMO
PV RESET
UP_LO_LIM
PV_SCALE
FF_GAIN
FF_SCALE TRK_SCALE
FF_VAL TRK_VAL
Управляющее
Отслеживание
воздействие (Tracking)
KH 8387-5 RU
13