Эксплуатация – Инструкция по эксплуатации KROHNE UFC 400 FOUNDATION FIELDBUS RU
Страница 95
Эксплуатация
4
95
UFC 400
www.krohne.com
11/2013 - 4003221801 - AD FF UFC 400 R01 ru
SP_RATE_DN
Уменьшение
скорости
изменения
заданного
значения
R/W
Скорость линейного изменения, с которой понижается
заданное значение в "автоматическом" режиме, в
единицах измерения переменной процесса в секунду.
Если скорость линейного изменения установлена на
ноль или блок находится в другом, отличном от
автоматического, режиме работы, то используется
непосредственно заданное значение.
+INF
Настройка:
0,0...+INF
SP_RATE_UP
Увеличение
скорости
изменения
заданного
значения
R/W
Скорость линейного изменения, с которой повышается
заданное значение в "автоматическом" режиме, в
единицах измерения переменной процесса в секунду.
Если скорость линейного изменения установлена на
ноль или блок находится в другом, отличном от
автоматического, режиме работы, то используется
непосредственно заданное значение.
+INF
Настройка:
0,0...+INF
STATUS_OPTS
Опции
состояния
R/W
Опции, которые может выбрать пользователь при
обработке блоком данных о состоянии.
Ни одна опция не
выбрана
Настройка:
• IFS if Bad IN (Аварийное состояние, если IN плохой):
Если статусом параметра IN является "Bad" (Плохой),
то для параметра OUT устанавливается статус "Initiate
Fault State" (
Инициировать аварийное состояние).
• IFS if Bad CAS_IN (Аварийное состояние, если CAS_IN
плохой): Если статусом параметра CAS_IN является
"Bad" (
Плохой), то для параметра OUT устанавливается
статус "Initiate Fault State" (Инициировать аварийное
состояние).
• Use Uncertain as Good (Использовать ненадёжный как
хороший): Если стаусом параметра IN является
"Uncertain" (
Ненадёжный), то рассматривать его как
"Good" (
Хороший), в других случаях как "Bad" (Плохой).
• Target to Man if Bad IN (Заданный режим на ручной, если
IN
плохой): Заданный режим устанавливается на "Man"
(
Ручной режим), если статус параметра IN "Bad"
(
Плохой). Таким образом, PID-блок удерживается в
состоянии "Man" (Ручной режим), когда статусом
входного сигнала является "Bad" (Плохой).
• Заданный режим изменяется на следующий
допустимый режим, если параметр CAS_IN имеет
статус BAD (ПЛОХОЙ)
TRK_IN_D
Дискретный
входной сигнал
отслеживания
R/W
Этот дискреиный входной сигнал используется для
запуска внешнего отслеживания выходного сигнала
блока по значению, указанному в параметре TRL_VAL.
-
Статус
R/W
Состояние параметра TRK_IN_D
-
Значение
R/W
Значение параметра TRK_IN_D
-
TRK_SCALE
Шкала
отслеживания
R/W
Максимальное и минимальное значение шкалы,
обозначение технической единицы измерения и
количество знаков справа от запятой, связанные с
параметром TRK_VAL.
-
EU
при 100%
R/W
Значение технической единицы измерения, которое
обозначает верхний предел диапазона
соответствующего параметра блока.
100
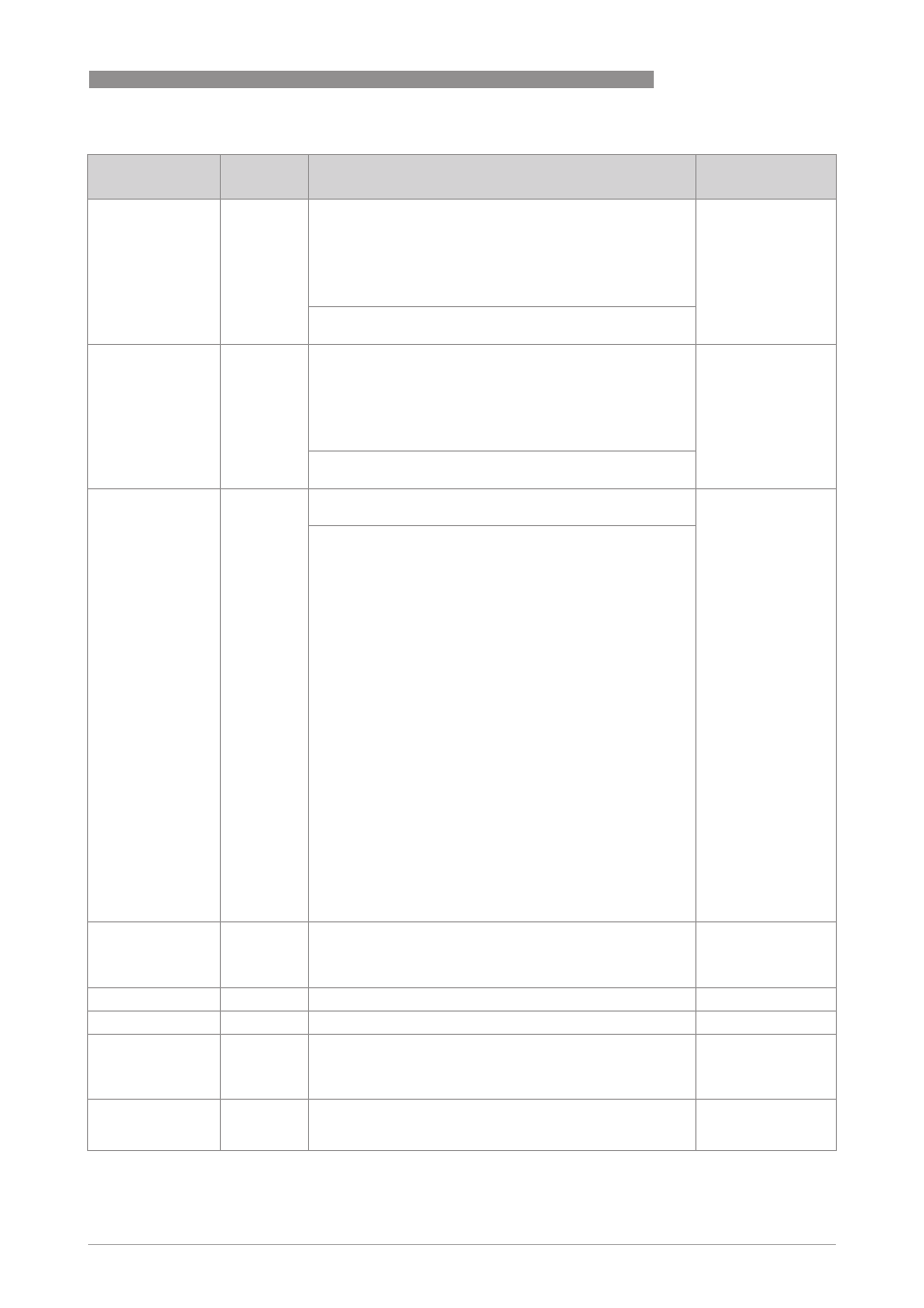
Параметр
Наименование DD
Доступ
Описание и настройки
Исходное значение