2 монтаж пневматической части, 3 монтаж электрической части – Инструкция по эксплуатации Festo Линейные приводы DGC-K
Страница 2
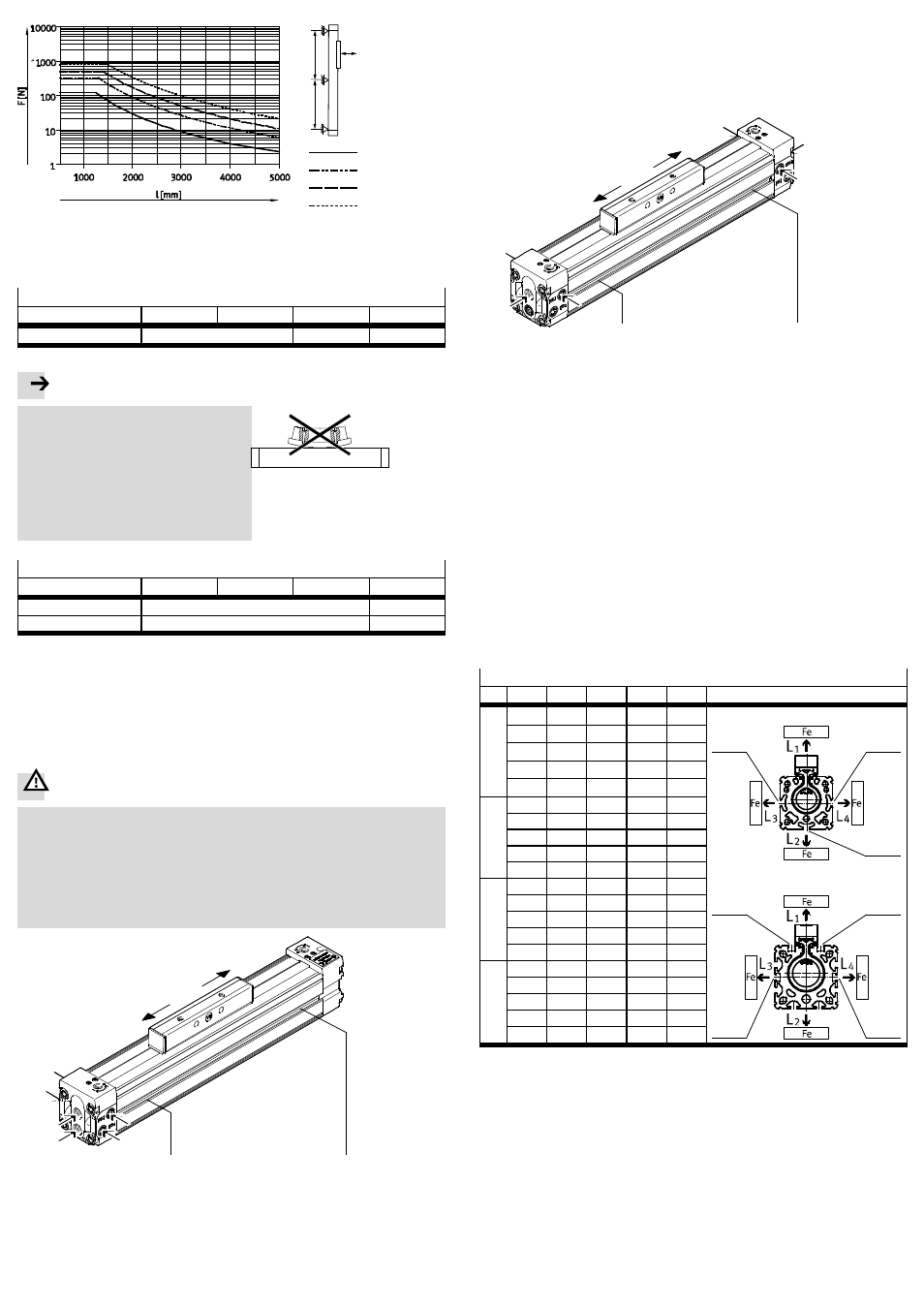
l
F
l
DGC-K-18
DGC-K-25
DGC-K-32
DGC-K-40
Fig. 5
Необходимые расстояния между опорными элементами (l) при верти-
кальном монтаже
• Соблюдайте моменты затяжки при закреплении профиля с помощью цен-
тральных опорных элементов MUP.
Моменты затяжки [Н·м]
DGC-K
18
25
32
40
M5
3
4,5
5,5
Fig. 6
Примечание
Вслучае твердых и жестких полезных на-
грузок:
Изгиб каретки
3 из-за установки на него
полезной нагрузки с выпуклой или вогну-
той поверхностью сокращает срок служ-
бы привода.
• Убедитесь, что поверхность, на
которую монтируется полезная
нагрузка, ровная.
Fig. 7
• Соблюдайте моменты затяжки для резьбы в каретке.
Моменты затяжки [Н·м]
DGC-K
18
25
32
40
M5
3,5
–
M6
–
6,0
Fig. 8
Для полезных нагрузок с собственной направляющей:
• Отрегулируйте направляющие полезной нагрузки и DGC-K строго параллель-
но.
Это позволит избежать перегрузки каретки (
11 Технические характери-
стики: допустимые усилия).
5.2 Монтаж пневматической части
При монтаже в вертикальном или наклонном положении:
Предупреждение
При падении давления перемещаемая нагрузка перемещается вниз:
Опасность защемления!
• Проверить, не требуются ли управляемые обратные клапаны HGL
(пневмозамки). Таким образом можно предотвратить внезапное
соскальзывание перемещаемой нагрузки.
• Проверить, не требуются ли меры предосторожности против медленного
снижения в результате утечки (например, храповые защёлки или
срезаемые штифты).
A(2)
A(1)
A(2)
W(2)
1
2
A(1)
W(1)
1
2
W = Заводской пневматический
канал
1 = Конечное положение на
стороне присоединения
1 = Движение в направлении
стороны присоединения
A = Альтернативные присоединения
2 = Конечное положение у глухой
крышки
2 = движение в направлении
к глухой крышке
Fig. 9
• Выберите подходящие пневматические каналы.
Наряду с заводскими пневматическими каналами (W) существуют и альтер-
нативные соединения (A). Вних находятся заглушки.
Влинейных приводах DGC-K, вариант D2 сжатый воздух может подключаться
с двух сторон.
A(1)
W(1)
A(2)
A(2)
W(2)
1
2
A(1)
1
2
W = Заводской пневматический
канал
1 = Конечное положение
на стороне присоединения
1 = Движение в направлении
стороны присоединения
A = Альтернативные присоединения
2 = Конечное положение у глухой
крышки
2 = Движение в направлении
к глухой крышке
Fig. 10
Для регулировки скорости:
• вкрутите дроссели с обратным клапаном типа GRLA в пневматические
каналы.
5.3 Монтаж электрической части
При опросе положения датчиками положения SME/SMT:
• Для крепления датчиков положения используйте пазы (S) (
Fig. 12).
• Соблюдать минимальные расстояния между ферритными массами и датчи-
ками положения.
Так вы не допустите ошибочных переключений в результате постороннего
воздействия.
Минимальные расстояния [мм]
ПОЗ.
18
25
32
40
L1
1
0
0
0
0
2
1
3
DGC-K-18/-25
4
5
DGC-K-32/-40
2
1
2
0
0
0
0
3
0
0
–
–
4
–
–
0
0
5
–
–
0
0
L2
1
10
0
0
0
2
10
0
0
0
3
30
10
–
–
4
–
–
0
0
5
–
–
0
0
L3
1
30
10
10
30
2
0
0
0
0
3
10
0
–
–
4
–
–
0
0
5
–
–
0
0
L4
1
0
0
0
0
2
30
10
10
30
3
10
0
–
–
4
–
–
0
0
5
–
–
0
0
Fig. 11 (ПОЗ. = позиция датчика положения)
При прокладке кабеля датчиков положения:
• Проследите, чтобы кабель датчика положения можно было проложить через
паз.